《UML 状态图的实用 C/C++设计》(QP状态机)学习笔记
- 架构
- UML 状态机速成
- 标准状态机的实现方法
- 层次式事件处理器的实现
- 状态模式
- 实时框架的概念
- 实时框架的实现
- 可抢占式“运行-到-完成”内核
- 移植和配置 QF
- 开发 QP 应用程序
- 事件驱动型系统的软件追踪
- 问题
- 参考
架构
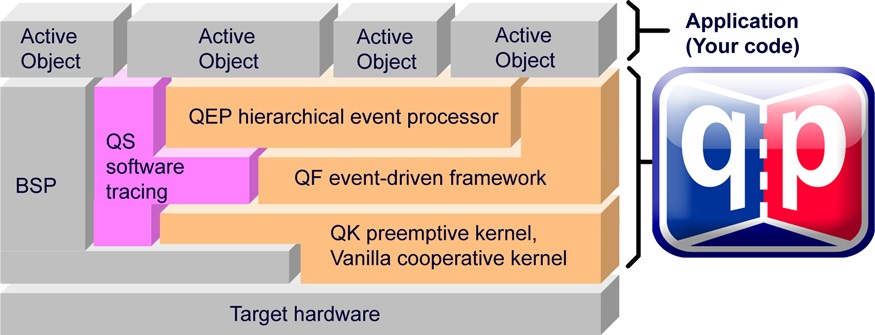
QF 是一个轻量级实时框架,是 QP事件驱动平台的核心构件, QP 也包括了 QEP层次式事件处理器(在本书第一部分描叙),可抢占的RTC内核(QK),和软件追踪装置(QS)。
控制的倒置 (Inversion of Control)
它和传统的顺序式编程方法例如“超级循环”,或传统的 RTOS 的任务不同。绝大多数的现代事件驱动型系统根据好莱坞原则被构造,“不要呼叫(调用)我们,我们会呼叫(调用)您”(Don’t call us, we will call you.)。因此,当它等待一个事件时,这个事件驱动型系统没有控制权。仅当一个事件到达了,程序才被调用去处理这个事件,然后它又很快的放弃控制权。这种安排允许这个事件驱动型系统同时等待许多事件,结果系统对所有需要处理的事件都能保持反应。
- 第一,它意味着一个事件驱动型系统被自然的分解到应用程序里面,由应用程序处理事件,而监督者是事件驱动的平台,由它等待事件并把它们分发给应用程序。
- 第二,控制存在于
事件驱动平台的基础设施 (infrastructure) 中,因此从应用程序的角度看,和传统的顺序式程序相比,控制被倒置了。 - 第三,事件驱动型应用程序必须在处理完每个事件后交出控制权,因此和顺序式程序不同的是,运行时上下文和程序计数器不能被保留在基于
堆栈的变量中。相反,事件驱动应用程序变成了一个状态机,或者实际上一组合作的状态机,并在静态变量里保留从一个事件到另一个事件的上下文。
假设我们有模块A和模块B,模块A依赖于模块B提供的数据,在传统的正常控制流中,应该是由模块A在需要数据时,调用模块B提供的接口并进入阻塞状态或轮询(都占用着CPU),直到数据返回,这个过程可以理解为A是主,B是从,A控制着B执行任务。
但在事件驱动模式中应该为模块A在需要数据时直接进入休眠状态,放弃CPU,不阻塞也不轮询,其无需关心B的状态,模块B也无需关心模块A的状态,当数据就绪时其就向模块A发送一个包含数据的事件并唤醒模块A,此时模块A才执行后续流程,这个过程中A不再控制着B,而是反过来由B触发A的动作,这就是控制的倒置。
在操作系统领域有个类似的概念,就是信号量,当模块A需要数据时可以利用信号量休眠,由模块B在数据准备就绪后修改信号量唤醒A。但这种方式只是简化版本,其同一时间只能监听一种事件,当模块A同时等待多个事件时就难以用信号量实现。另一个方式就是回调,模块A可以将部分必要操作作为回调函数传递给模块B,这样模块B准备好数据后就可以执行该回调代表模块A处理任务。
UML 状态机速成
基本的状态机概念
状态
你不用许多变量、标志和复杂逻辑来记录事件历史,而主要依靠一个状态变量,它能被假定为一些有限的已经被确定的值,比如手机的勿扰模式包括了不播放声音、不震动、不自动亮屏等一些设置项,此时对于通知或者来电的处理和正常模式不一样,原来要判断很多设置项,现在只要判断是否是勿扰模式这一个状态就行。
状态图
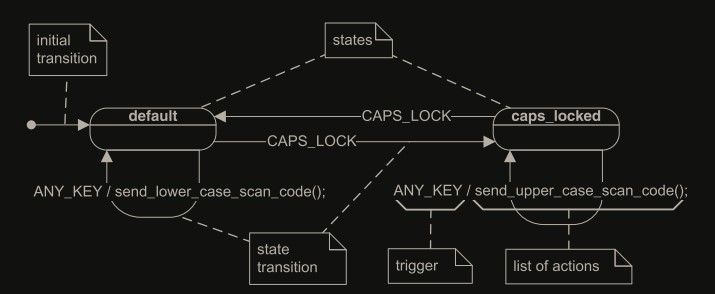
- 状态:圆角矩形
- 状态名:圆角矩形里的标签
- 状态转换:箭头
- 事件:箭头上的标签的
/的前半部分,一般大写 - 动作:箭头上的标签的
/的后半部分 - 初始转换:实心圆点加箭头
事件 (Event)
一个事件是对系统有重大意义的一个在时间和空间上所发生的事情。
UML 图中事件表示事件类型而不是实例,实际程序中判断的是事件类型实例化后的事件实例。
动作和转换 (Action and Transition)
从一个状态切换到另一个状态被称为状态转换,引发它的事件被称为触发事件 (triggering event) ,或简单的被称为触发 (trigger) 。
运行-到-完成执行模型 (Run-to-Completion Execution Model, RTC)
在 RTC 模型里,系统在分散的不可分割的 RTC 步骤里处理事件。新到的事件不能中断当前事件的处理,而且必须被存储(通常是存储在一个事件队列里),直到状态机又变成空闲。这些语义完全避免了在一个单一的状态机里的任何内部并发问题。
实际上 RTC 步骤可以被抢占,只要抢占它的进程不会共享和该状态机相关的资源,抢占结束能恢复原始上下文就行。
UML 对传统 FSM 方法的扩展
状态机分类
- 有限状态机 (FSM)
- 行为的改变(例如,响应
任何事件的改变)对应着状态改变,被称为状态转换。 - 扩展状态机(ESM)
- 事件的发生并不意味着状态改变,通过
定量的方式,让事件发生达到监护条件(如次数)才改变状态。
监护条件 (Guard Condition):为状态转换添加定量条件,如事件发送达到 1000 次条件才为真,才发生状态转换
- 层次式状态机(HSM)
- 子状态没有对应事件处理方法时,寻找父状态处理方法。不同的子状态
复用了父状态的处理方法,类似于继承(抽象)
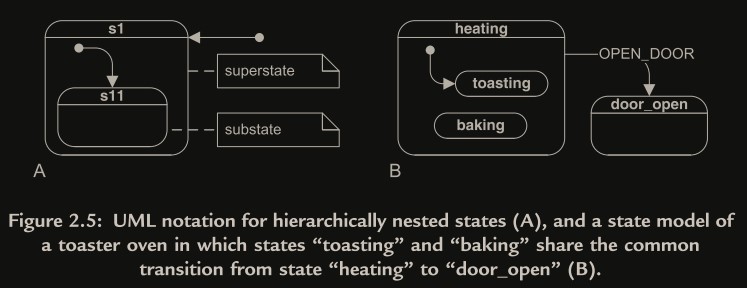
包含其他状态的状态被称为复合状态 (composite state) ,相对的,没有内部结构的状态被称为简单状态 (simple state)。一个嵌套的状态当它没有被其他状态包含时被称为直接子状态 (direct substate),否则,它被归类于过渡性嵌套子状态 (transitively nested substate) 。
行为继承 (Behavioral Inheritance)
复用父类处理方法,相当于 OOP 中继承父类函数
状态的 LISKOV 替换原则 (LSP)
一个子状态的行为应该和超状态(父状态)一致。
Liskov 替换原则的核心是保持行为的兼容性,即子类不仅需要在语法上继承父类的结构,还需要在语义上符合父类的预期行为。
如果在状态 heating 意味着加热器开启,子状态(在不从状态 heating 转换出去的情况下)不能意味着加热器关闭。
另见里氏替换原则
正交区域
计算机键盘的两个正交区域(主键区和数字键区)。
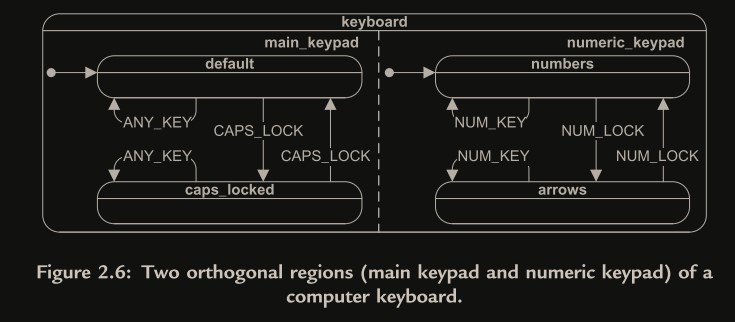
当一个系统的行为被分解为独立的并发性的主动部分时,状态数目组合性增加,正交区域解决了这个常常碰到的问题。例如,除主键区外,一个计算机键盘有一个独立的数字键区。
尽管正交区域意味着执行时的独立性(也就是说有一些并发性), UML 规范没有要求为每一个正交区域分配一个独立的执行线程(尽管可以这样做)。事实上最普通的情况是,这些正交区域在同一个线程里执行。UML 规范仅要求设计者在一个事件被派发到一些相关的正交区域时,不要依赖于任何特定的次序。
进入和退出动作 (Entry and Exit Actions)
UML 的状态图里的每个状态机都可以有可选的进入动作,它在进入一个状态时被执行;同时也可以有可选的退出动作,在退出一个状态时被执行。
无论一个状态被以什么方法进入或退出,所有它的进入和退出动作将被执行。(自动强制执行)
进入和退出动作的价值是它们提供了可担保的初始化和清理方法,非常像 OOP 里类的构造函数和析构函数
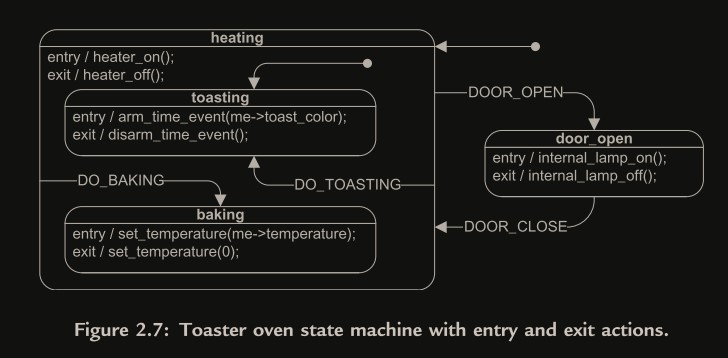
如图,当炉门在打开时总是关闭加热器(heating 状态退出动作)。另外当炉门被打开,应该点亮内部照明灯(door_open 状态进入动作)。
进入动作的执行必须总是按从最外层状态到最里层状态的次序被处理,如 DOOR_CLOSE 事件让状态变为 heating ,此时先执行 heater_on() ,再因初始转换自动进入子状态 toasting ,并执行 arm_time_event(me->toast_color) 。类比于构造函数的调用顺序
内部转换 (Internal Transistions)
一个事件造成一些内部动作被执行但是又不导致一个状态的改变(状态转换),也不执行任何进入退出动作
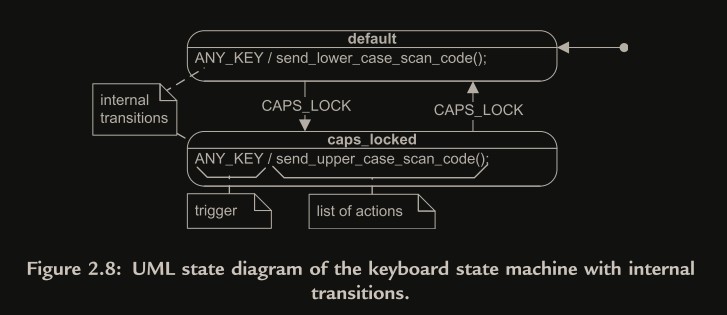
当你在键盘上打字时,它通过产生不同的字符码来响应。然而,除非你敲击CapsLock键,键盘的状态不会改变(没有状态转换发生)。 ANY_KEY 事件触发内部转换
和自转换相反,在执行内部转换时不会执行进入和退出动作,即使内部转换是从一个超过当前活动状态较高层的层次继承的。从超状态继承的内部转换在任何的嵌套层都如同它们被直接在当前活动状态被定义一样执行。
转换的执行次序
如果状态机有一个复合状态(它也可以被包含在一个更高层的复合状态, 并递归嵌套)里面的叶状态,所有的直接或间接包含这个叶状态 (leaf state)的复合状态都是活动的。而且, 因为在这个层次里的一些复合状态也许有正交区域,当前活动状态事件代表了一个树,从在根部的单一顶状态开始往下直到在这个叶的单一简单状态。 UML 规范把这样一个状态树叫做状态配置 (state configuration)
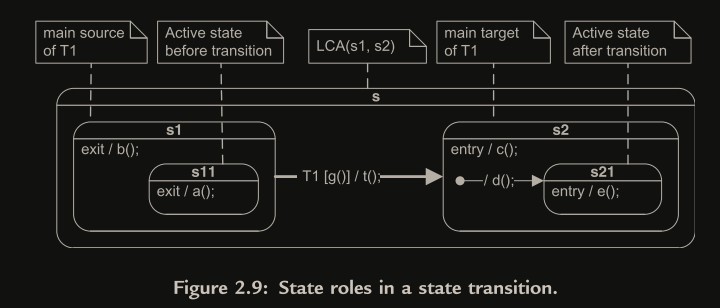
在 UML ,一个状态转换能直接连接任何两个状态。这两个状态也许是复合的状态,它们被定名一个转换的主源 (main source) 和主目标 (main target)。图 2.9 展示了一个简单的转换实例,并解释了在这个转换里的状态的角色。 UML 规范描叙了执行一个状态转换需要牵涉到以下的动作:
- 评估和转换联合的监护条件,如果监护条件为真则执行以下的步骤。
- 退出源状态配置。
- 执行和转换联合的动作。
- 进入到目的状态配置。
在这个简单的实例里,主源和主目标在相同的层嵌套,因此这个转换序列很容易解释。例如,图 2.9 所示的转换 T1 引起监护条件 g() 的评估,假设监护条件 g() 被评估为真,后面是动作的执行序列: a() ; b() ; t() ; c() ; d() ; e() 。
本书改动:
本书描叙的 HSM实现(见第四章)通过进入到目标状态配置来维持必要的退出源结构的次序,但是完全在源状态的上下文里去执行和转换联合的动作。也就是说,在退出源状态配置之前执行。所实现的具体的转换序列如下:
- 评估和转换联合的监护条件,仅当监护条件为真,执行以下的步骤。
- 执行和转换联合的动作。
- 退出源状态配置并进入到目标状态配置。
例如,图 2.9 所示的转换 T1 会引发对监护条件 g() 的评估;然后当对监护条件 g() 为真时是动作序列: t() ;a() ; b() ; c() ; d() ; e() 。
就是先进行转换和对应动作,再退出源状态,因为退出源状态意味着清空了上下文,不退出就可以利用源状态的上下文信息做些事情
本地转换和外部转换的对比
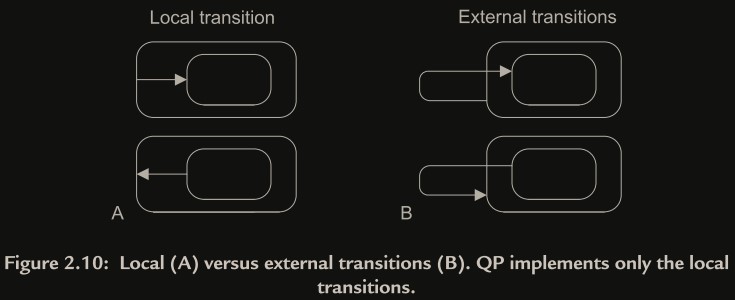
本地转换:
- 图中(a)上半:在主目标状态是
主源状态的一个子状态时,并不会导致从主源状态的退出。 - 图中(a)下半:在主目标状态是
主源状态的一个超状态时,不会导致退出和重新进入目标状态。
外部转换:
- 图中(b)上半:在主目标状态是
主源状态的一个子状态时,导致退出和重新进入主源状态。 - 图中(b)下半:在主目标状态是
主源状态的一个超状态时,导致退出和重新进入目标状态。
在本书第四章描叙的 HSM 实现(以及本书第一版描叙的 HSM 实现)仅支持
本地转换语义。
UML 里的事件类型
UML 规范定义了四种事件,通过具体的符号区分它们:
signalEvent代表一个特定的(异步)信号。它的格式是:信号名 ’(’ 逗号分开的变量表 ’)’。TimeEvnt对一个特定的最后期限建模。它用关键词after标识,后面是一个具体指明时间量的表达式。时间从进入到以 TimeEvnt 为一个触发的状态开始计时。callEvent代表了同步地调用一个特定操作的请求。它的格式是:操作名 ’(’ 逗号分开的变量表 ’)’。changeEvent对一个明确的布尔表达式为真时出现的一个事件建模。它用关键词when标识,后面是一个布尔表达式。
本书描叙的 HSM 实现(见第四章)仅支持
SignalEvent类型。第 2 部分描叙的实时框架增加了对 TimeEvent 类型的支持,但是 QF 里的 TimeEvent 需要明确的启动和解除,这和 UML 的 after 符号不兼容。因为 SignalEvent多态性事件触发的固有的复杂性和非常高的性能开销,它也不被支持。
事件的延迟 (Event Deferral)
有时候,一个事件,在一个状态机正在某个状态中从而不能处理这个事件这种特别不方便的时刻到达。在很多情况下,事件的本性是它可以被(有限度的)推迟,直到系统进入到另一个状态,在那里它被更好的准备去处理这个原来的事件。
UML 状态机提供了一个特定的机制,用来在状态里延迟事件。在每一个状态,你能包含一个 deferred / [event list]。如果在当前状态的延迟事件列表中的一个事件出现,这个事件会被保留(延迟)给将来处理,直到进入到一个没有把它放在自己的延迟事件列表中的状态。在进入这种状态时, UML 状态机将自动的恢复任何被保留的事件,不再延迟它们,而像它们刚刚到达一样处理它们。
关联章节延迟的事件
伪状态 (Pseudostates)
初始伪状态(initial pseudostate)(显示为一个黑点)表示了一个初始转换的源。在一个复合状态里,可以有最多一个初始伪装态。从初始伪装态出发的转换可能有动作,但是没有触发或者监护条件。选择伪状态(choice pseudostate)(显示为一个菱形或空心圈)被用来进行动态条件分支。它允许转换的分裂到多个外向路径,因此决定使用哪一个路径取决于在相同的 RTC 步骤先前被执行的动作。- 浅历史伪状态 (shallow-history pseudostate)
- 深历史伪状态 (deep-history pseudostate)
- 连接点伪状态 (junction pseudostate)
- 结合伪状态 (join pseudostate)
- 分支伪状态 (fork pseudostate)
只介绍两个常用的,其他的不做介绍
UML 实例
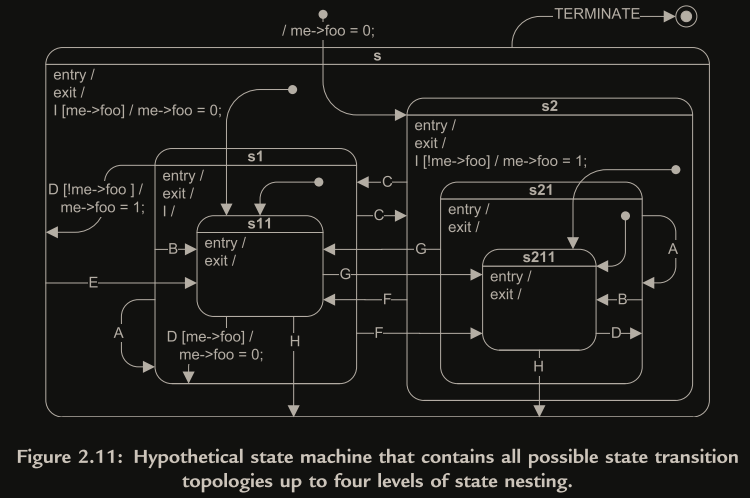
假想的 4 层嵌套状态机,包含了所有可能的状态转换拓扑,初始 me->foo 为 0:
状态切换,QHSMTST.EXE 实例程序运行在命令窗口。 在括号里的是供参照的行序号:
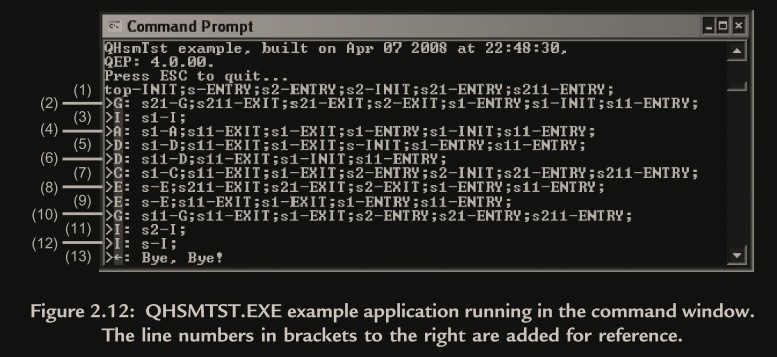
(5) 当前状态为 s11,首先使用 s11 自带的 D 事件处理方法处理 D 事件,发现 D 的监护条件不满足,则转而执行 s11 父状态 s1 的 D 事件处理函数,发现监护条件满足。然后先退出 s11 到 s1,因为本次转换的源状态需要为 s1,然后切换到目标状态 s。因为 s 状态包含初始伪状态,需要执行初始伪状态对应的转换(见 伪状态 (Pseudostates)),所以会进入 s1 再进入 s11(虽然箭头直接指向 s11,但不能越过 s11 的进入动作)。
事件的表示
- 事件名称(类型)
- (可选)菱形分割
- 监护条件(判断条件,
[]包裹) - 分割号
/ - 动作
- 源状态(超状态有个黑点表示本状态,表示进入此状态时无条件自动进入目标状态,状态机不能处于超状态下)
- 目标状态
示例 1:
I[me->foo]/me->foo=0,I为事件名称,[me->foo]为监护条件,分割号/分割了事件信息和动作,me->foo=0为动作。示例 2:
entry/,entry表示 entry 事件,没有对应的动作和监护条件;exit/,exit表示 exit 事件,没有对应的动作和监护条件
满足监护条件才会执行对应的状态转换和动作。
子状态之间的状态转换需要源状态依次退出到双方的最小共同父状态(如 s11 和 s211 的最小共同父状态为 s,书中叫最少共同祖先 least common ancestor(LCA),我觉得不太好理解),再依次进入到目的标态
设计一个 UML 状态机
计算器(见图 2.13)总的来说操作如下:用户输入一个操作数 (operand) ,然后一个操作符 (operator),然后另一个操作数,最后点击等号按钮得到一个结果。从编程的角度看,意味着这个计算器需要对由下面 BNF 语法定义的数字表达式进行语法分析
1
2
3
4
5
expression ::= operand1 operator operand2 '='
operand1 ::= expression | ['+' | '-'] number
operand2 ::= ['+' | '-'] number
number ::= {'0' | '1' | ... '9'}* ['.' {'0' | '1' | ... '9'}*]
operator ::= '+' | '-' | '*' | '/'
高层设计
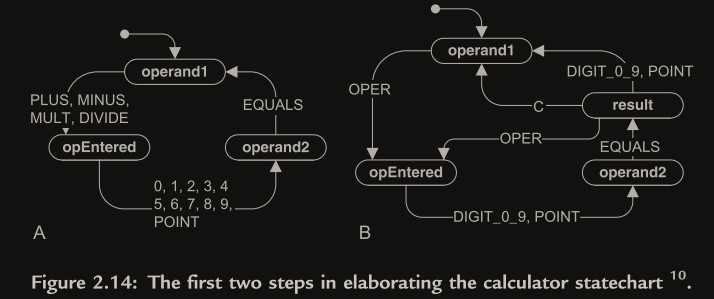
(A)的问题是没有结果显示状态(result),完善后得到(B),可以在开始下一次输入 operand1 前清空屏幕,还可以将结果作为下一次的 operand1
把信号 PLUS ,MINUS, MULTIPLY 和 DIVIDE
合并成一个高级的信号OPER(操作数)。这个变换避免了在两个转换(从 operand1 到 opEntered,和从 result 到 opEntered)上重复相同的触发(这里的意思应该就是简化设计,不然要画 4 条箭头)。
寻找重用 (Reuse)
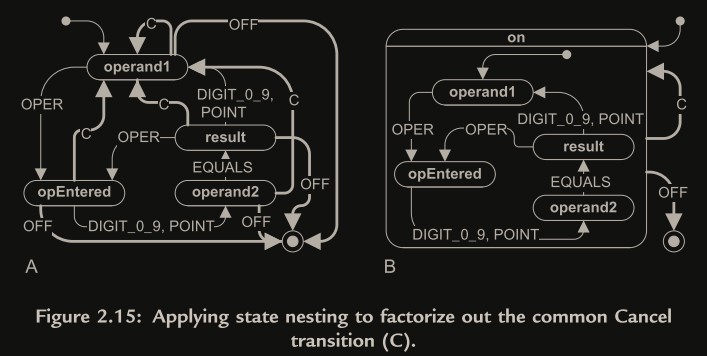
为了保证能在任意状态执行 Clear 初始化和关机,需要很多状态转换。
此时可以提取一个超状态,初始化操作和关机操作放到超状态(图中(B)),让子状态重用该操作,这里就利用了层次式状态机
operandX 状态设计
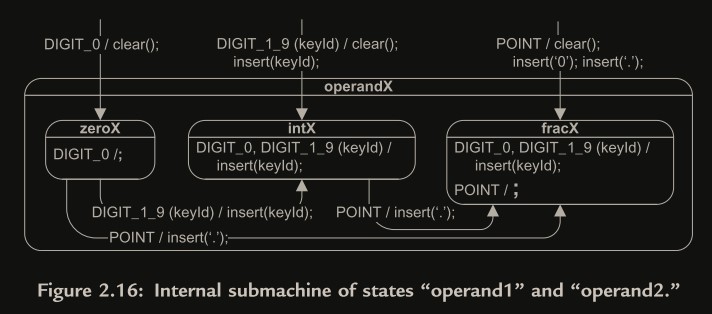
三个入口:
- 输入 0 事件 – zeroX 状态
- 输入 1-9 事件 – intX 状态
- 输入小数点事件 – fracX 状态
三个状态:
zeroX
- 忽略输入 0 事件
- 其他事件产生状态切换
intX
- 处理输入 0-9 事件
- 输入小数点事件产生状态切换
fracX
- 处理输入 0-9 事件
- 忽略输入小数点事件
处理负号的两种情况
如表达式 -2 * -2 =
添加两个和 operandX 同级的状态 negated1 和 negated2 用于处理数字前的负号,和 zeroX 状态类似
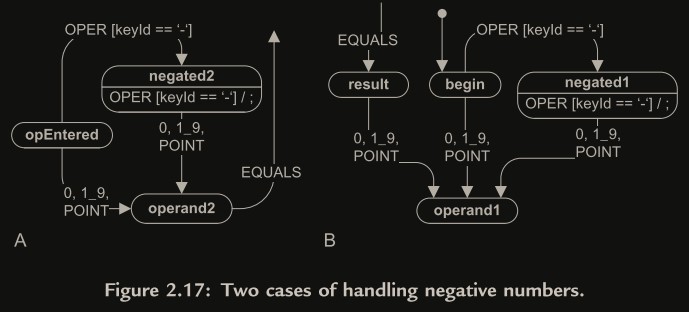
(A) 为第二个操作数添加负号,opEntered状态下收到 OPER 事件,判断监护条件按键是否是’-‘,是的话进入negated2状态,该状态仅处理数字和小数点。
(B) 为第一个操作数添加负号,opEntered状态下收到 OPER 事件,判断监护条件按键是否是’-‘,是的话进入negated1状态,该状态仅处理数字和小数点。
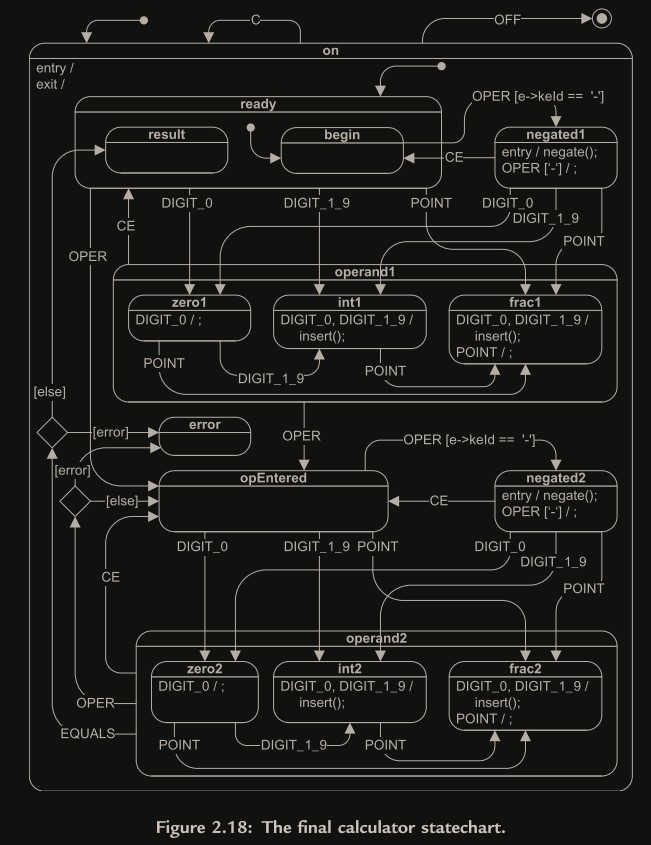
最终状态图
标准状态机的实现方法
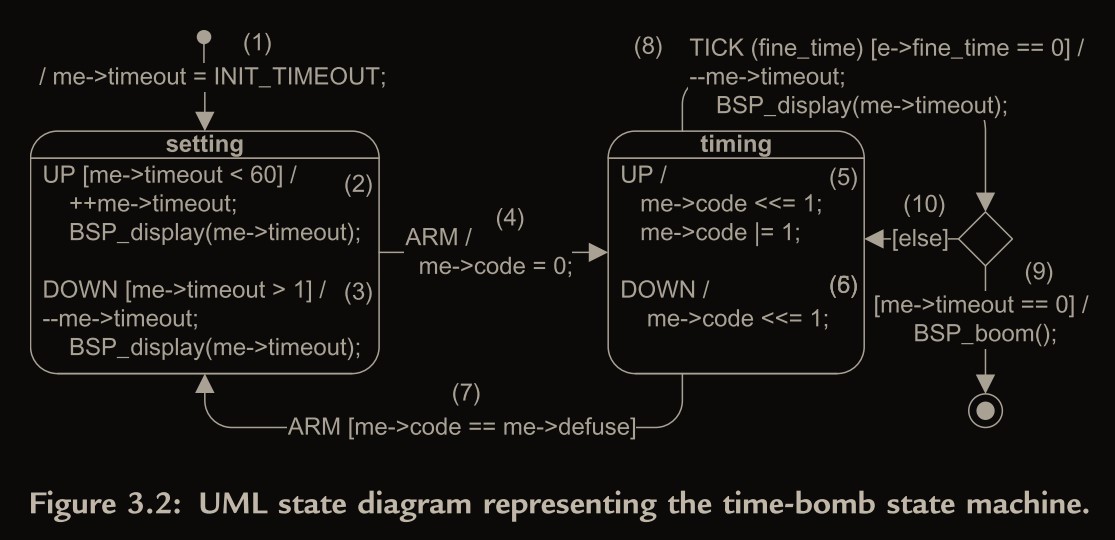
定时炸弹有一个带有 LCD 的控制面板显示当前的超时值,还有三个按钮: UP ,DOWN 和 ARM 。用户开始时要设定时炸弹,使用 UP 和 DOWN 按钮以一秒的步长调节超时值。一旦所需要的超时值被选中,用户能通过按 ARM 按钮来启动这个炸弹。当启动后,炸弹开始每秒递减这个超时值, 并在超时值到达零时爆炸。附加的安全特征是通过输入一个密码来拆除一个已启动的定时炸弹雷管的选项。拆雷管的密码是 UP 和 DOWN 按钮的某个组合,并以 ARM 按钮被按下结束。当然,拆雷管的密码必须在炸弹超时前被正确的输入。
定时炸弹状态机的 UML 状态图:
嵌套的 switch 语句
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
void Bomb1_dispatch(Bomb1 *me, Event const *e) { /* dispatching */
switch (me->state) {
case SETTING_STATE: {
switch (e->sig) {
case UP_SIG: { /* internal transition with a guard */
...}
}
...
}
case TIMING_STATE: {
switch (e->sig) {
case UP_SIG: {
me->code <<= 1;
me->code |= 1;
break;
}
...
}
...
}
...
}
}
状态表 (State Table)
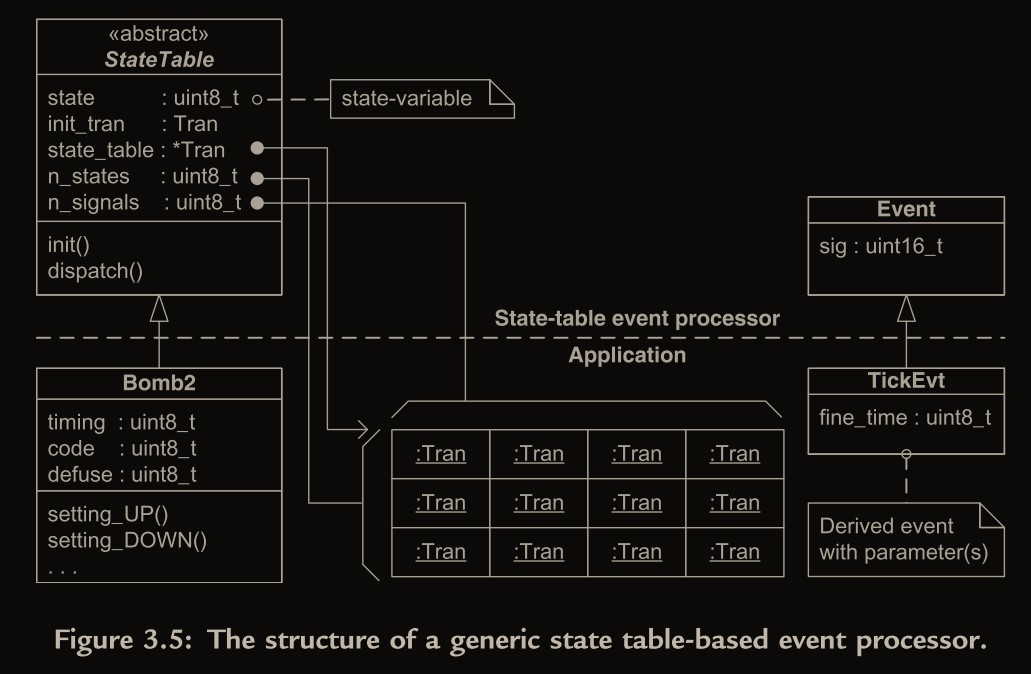
| 当前状态 | 事件 ( 参数 ) | [ 监护条件 ] | 下一状态 | 动作 |
|---|---|---|---|---|
| setting | UP | [me->timeout < 60] | setting | ++me->timeout;BSP_display(me->timeout); |
| DOWN | [me->timeout > 1] | setting | –me->timeout;BSP_display(me->timeout); | |
| ARM | timing | me->code = 0; | ||
| TICK | setting | |||
| timing | UP | timing | me->code «=1;me->code = 1; | |
| DOWN | timing | me->code «= 1; | ||
| ARM | [me->code == me->defuse] | setting | ||
| TICK(fine_time) | [e->fine_time == 0] | choice | –me->timeout;BSP_display(me->timeout); | |
| [me->timeout == 0] | final | BSP_boom(); | ||
| [else] | timing |
面向对象的状态设计模式
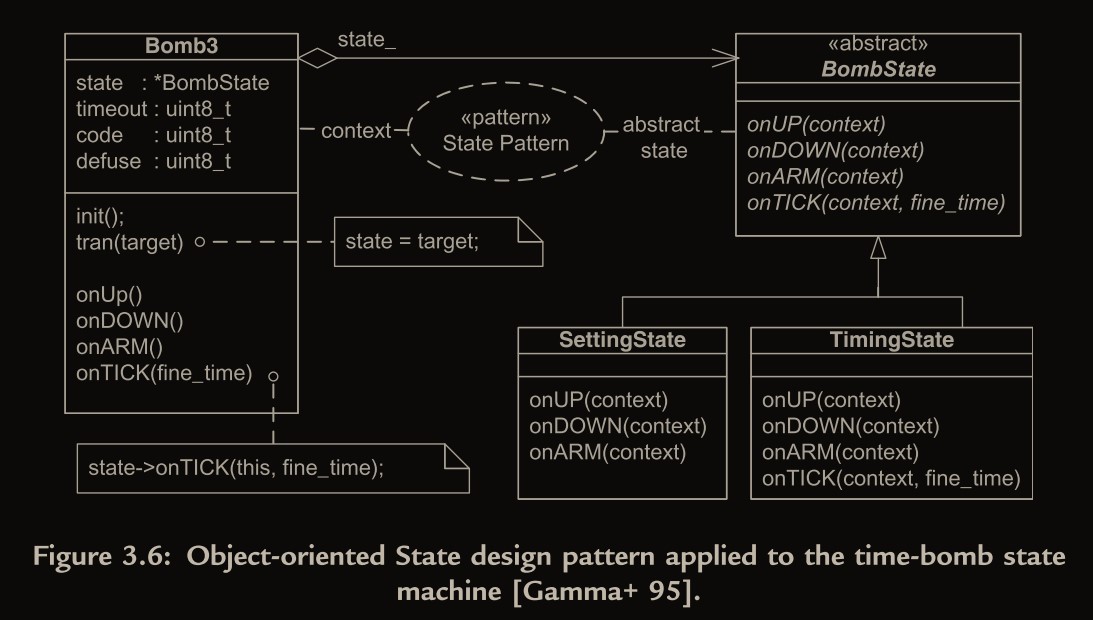
用到了多态,使用 C++实现更为简单
正常来说 BombState 被定义为抽象类,应该包含至少一个纯虚函数,不过此处没有,应该是为了让子类继承父类中虚函数的空实现。
增加进入退出状态操作
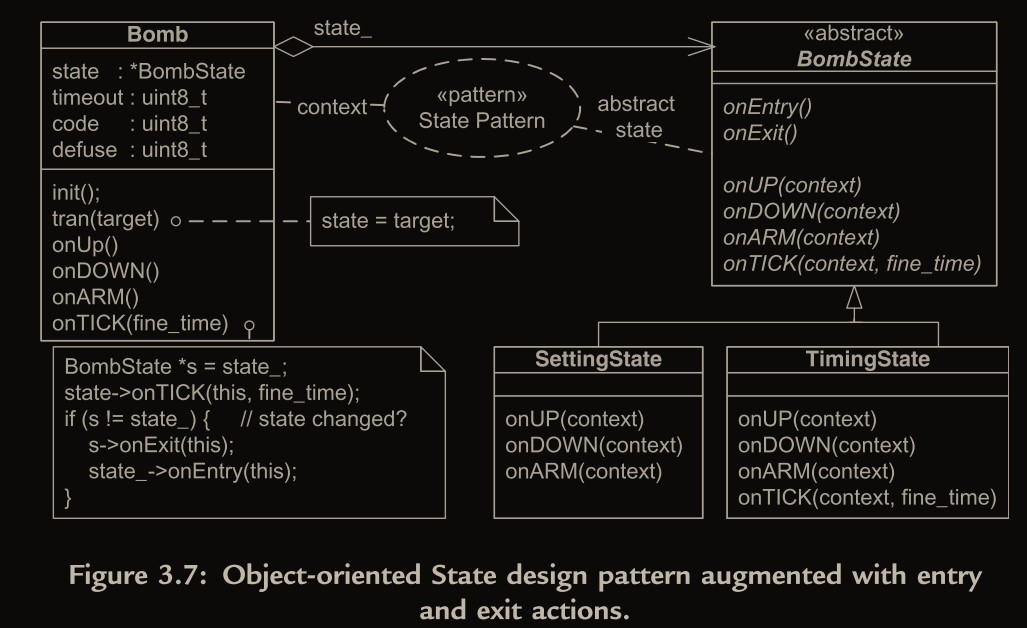
Bomb 类的 onTick()操作不仅调用了 BombState 状态或是子状态的 onTick 事件处理,还检测了状态是否切换,并执行对应的退出和进入动作
封装事件处理
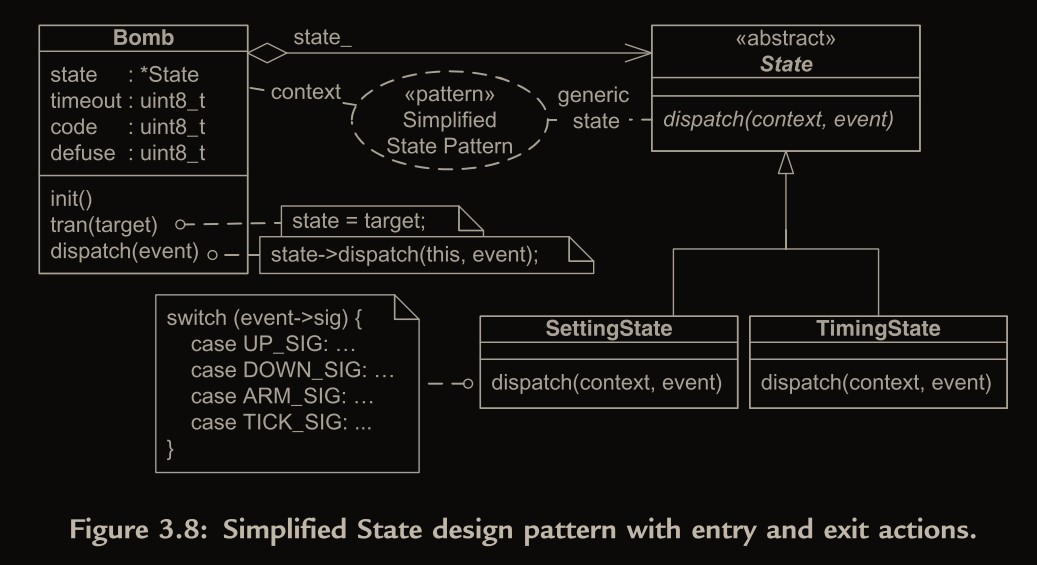
封装了状态中的事件处理函数,这就导致需要在封装函数内使用switch区分事件并执行操作。
坏处是失去了 C++提供的多态性
好处是在添加新事件时只需修改函数内内容,无需增加函数定义
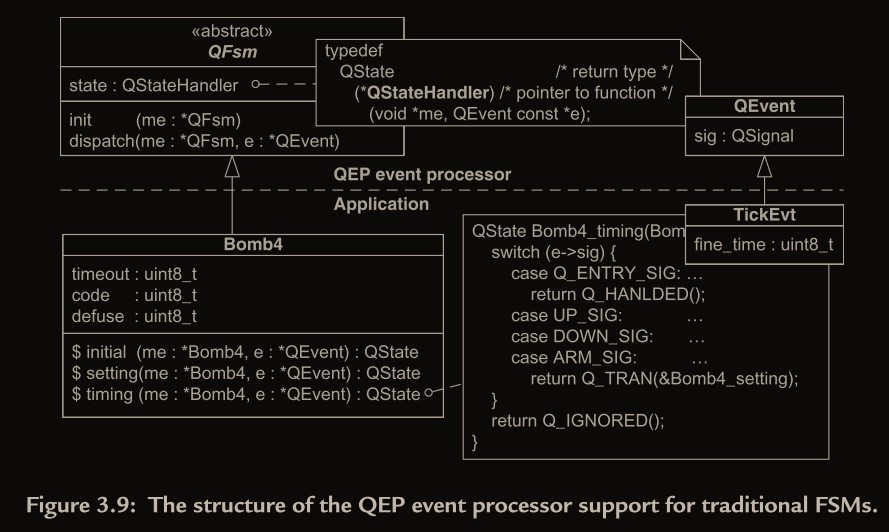
QEP FSM 实现方法
在前面的几节里,提供了实现 FSM 的三种最流行的技术。可是从我的经验来说,单独使用它们时没有一个是最优的
本章只介绍 FSM 的实现,HSM 层次式状态机的在下一章
通用的 QEP 事件处理器:
QEP(事件处理器)设计的创新性来自于把状态直接映射成状态处理函数,处理在状态里它们表示的全部事件
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
/* qevent.h ----------------------------------------------------------------*/
typedef struct QEventTag
{ /* the event structure */
// 一个整数,相当于事件唯一标识,方便switch...case...区分事件
QSignal sig; /* signal of the event */
uint8_t dynamic_; /* dynamic attribute of the event (0 for static) */
} QEvent; // 事件,可派生添加参数
/* qep.h -------------------------------------------------------------------*/
// 事件处理对事件处理的状态
typedef uint8_t QState; /* status returned from a state-handler function */
// 状态处理函数指针,本设计中状态处理函数就表示状态,有typedef表示指定它的类型为QState,
// 相当于一种声明,而非定义产生实例
typedef /* pointer to function type definition */
QState /* return type */
(*QStateHandler) /* name of the pointer-to-function type */
(void *me, QEvent const *e); /* argument list */ // 一个通用状态机的指针和一个 QEvent指针
typedef struct QFsmTag
{ /* Finite State Machine */
// 当前处于的状态,指向状态处理函数
QStateHandler state; /* current active state */
} QFsm; // 派生各个状态机结构的基本类
#define QFsm_ctor(me_, initial_) ((me_)->state = (initial_))
// 触发状态机的初始转换
void QFsm_init(QFsm *me, QEvent const *e);
// 派发一个事件给状态机
void QFsm_dispatch(QFsm *me, QEvent const *e);
// 从状态处理函数到事件处理器的返回状态
#define Q_RET_HANDLED ((QState)0)
#define Q_RET_IGNORED ((QState)1)
#define Q_RET_TRAN ((QState)2)
// 当一个状态处理函数正常处理了当前的事件且不需要状态切换时,返回宏 Q_HANDLED( ) 。
#define Q_HANDLED() (Q_RET_HANDLED)
// 当一个状态处理函数忽略(不处理)当前的事件时,返回宏 Q_IGNORED( )
#define Q_IGNORED() (Q_RET_IGNORED)
// 当一个状态处理函数处理了当前的事件且需要状态切换时,返回宏 Q_TRAN( ) 。
/** 逗号表达式表示执行逗号前语句,但整个表达式的值为逗号后变量,优先级比'='更低,
先执行((QFsm *)me)->state = (QStateHandler)(target_),但Q_TRAN(target_)值为Q_RET_TRAN
这里可以用(QFsm *)强制转换me是因为派生类me的第一个成员变量就是它的父类QFsm实例,内存起始位置和me一样
*/
#define Q_TRAN(target_) \
(((QFsm *)me)->state = (QStateHandler)(target_), Q_RET_TRAN)
// 内部使用的信号。QEP实现HSM的进入、退出、初始转换动作的方式也是使用事件,只不过这几个事件是内部专用的。
// QEP内部维护一个 const 的保留事件数组 QEP_reservedEvt_[ ]。用于保存这几个信号对应的事件
enum QReservedSignals
{
Q_ENTRY_SIG = 1, /* signal for coding entry actions */
Q_EXIT_SIG, /* signal for coding exit actions */
Q_INIT_SIG, /* signal for coding initial transitions */
Q_USER_SIG /* first signal that can be used in user applications */
};
QEP FSM 事件处理器的实现:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
/* file qfsm_ini.c ---------------------------------------------------------*/
#include "qep_port.h" /* the port of the QEP event processor */
#include "qassert.h" /* embedded systems-friendly assertions */
void QFsm_init(QFsm *me, QEvent const *e)
{
// 执行QFsm超状态的状态处理函数,就是init
(*me->state)(me, e); /* execute the top-most initial transition */
// 进入目的状态,手动指定状态切换事件(用信号Q_ENTRY_SIG指定),并处理状态切换事件
// QEP内部维护一个 const 的保留事件数组 QEP_reservedEvt_[ ]。用于保存几个内部信号对应的事件
(void)(*me->state)(me, &QEP_reservedEvt_[Q_ENTRY_SIG]);/* enter the target */
}
/* file qfsm_dis.c ---------------------------------------------------------*/
// 事件生成函数
void QFsm_dispatch(QFsm *me, QEvent const *e)
{
// 在栈空间中临时保存,防止执行事件处理函数切换状态后丢失源状态
QStateHandler s = me->state; /* save the current state */
// 调用当前状态中对应的事件处理函数
QState r = (*s)(me, e); /* call the event handler */
if (r == Q_RET_TRAN) // 执行事件处理函数后发生了状态转换
{ /* transition taken? */
// 退出源状态,调用源状态的事件处理函数(发送信号Q_EXIT_SIG)
(void)(*s)(me, &QEP_reservedEvt_[Q_EXIT_SIG]); /* exit the source */
// 进入目的状态,调用目的状态的事件处理函数(发送信号Q_ENTRY_SIG)
(void)(*me->state)(me, &QEP_reservedEvt_[Q_ENTRY_SIG]); /*enter target*/
}
}
应用程序相关的代码(定时炸弹实例):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
#include "qep_port.h" /* the port of the QEP event processor */
#include "bsp.h" /* board support package */
// 内部使用的信号
enum BombSignals
{ /* all signals for the Bomb FSM */
UP_SIG = Q_USER_SIG,
DOWN_SIG,
ARM_SIG,
TICK_SIG
};
// 继承自QEvent的Tick事件
typedef struct TickEvtTag
{
QEvent super; /* derive from the QEvent structure */
uint8_t fine_time; /* the fine 1/10 s counter */
} TickEvt;
// 继承自QFsm的状态机,增加了自定义的一些参数
typedef struct Bomb4Tag
{
QFsm super; /* derive from QFsm */
uint8_t timeout; /* number of seconds till explosion */ //倒计时
uint8_t code; /* currently entered code to disarm the bomb */ //密码输入值
uint8_t defuse; /* secret defuse code to disarm the bomb */ //密码
} Bomb4;
// 后面是不是就是检测到事件时调用me->state(me,e)就行
void Bomb4_ctor(Bomb4 *me, uint8_t defuse); // 初始化(类似C++的构造函数)
QState Bomb4_initial(Bomb4 *me, QEvent const *e); // 入口
QState Bomb4_setting(Bomb4 *me, QEvent const *e); // setting状态事件处理函数
QState Bomb4_timing(Bomb4 *me, QEvent const *e); // timing状态事件处理函数
/*--------------------------------------------------------------------------*/
/* the initial value of the timeout */
#define INIT_TIMEOUT 10
/*..........................................................................*/
void Bomb4_ctor(Bomb4 *me, uint8_t defuse)
{
QFsm_ctor_(&me->super, (QStateHandler)&Bomb4_initial);
me->defuse = defuse; /* the defuse code is assigned at instantiation */
}
/*..........................................................................*/
QState Bomb4_initial(Bomb4 *me, QEvent const *e)
{
(void)e;
me->timeout = INIT_TIMEOUT;
return Q_TRAN(&Bomb4_setting); //切换到setting
}
/*..........................................................................*/
QState Bomb4_setting(Bomb4 *me, QEvent const *e)
{
// 使用switch区分事件,这里是用了QEvent中的一个整数变量sig,相当于事件唯一标识,
// 因为switch只支持int整数,不支持结构体
switch (e->sig)
{
case UP_SIG:
{
if (me->timeout < 60)
{
++me->timeout;
BSP_display(me->timeout);
}
return Q_HANDLED();// 不切换状态就返回Q_HANDLED()
}
case DOWN_SIG:
{
if (me->timeout > 1)
{
--me->timeout;
BSP_display(me->timeout);
}
return Q_HANDLED();
}
case ARM_SIG:
{
// 需要切换状态就使用Q_TRAN
return Q_TRAN(&Bomb4_timing); /* transition to "timing" */
}
}
return Q_IGNORED();// 没有对应事件就返回Q_IGNORED()
}
/*..........................................................................*/
void Bomb4_timing(Bomb4 *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
me->code = 0; /* clear the defuse code */
return Q_HANDLED();
}
case UP_SIG:
{
me->code <<= 1;
me->code |= 1;
return Q_HANDLED();
}
case DOWN_SIG:
{
me->code <<= 1;
return Q_HANDLED();
}
case ARM_SIG:
{
if (me->code == me->defuse)
{
return Q_TRAN(&Bomb4_setting);
}
return Q_HANDLED();
}
case TICK_SIG:
{
// 拿派生事件的自定义参数也没问题
if (((TickEvt const *)e)->fine_time == 0)
{
--me->timeout;
BSP_display(me->timeout);
if (me->timeout == 0)
{
BSP_boom(); /* destroy the bomb */
}
}
return Q_HANDLED();
}
}
return Q_IGNORED();
}
状态机实现技术的一般性讨论
函数指针是使用 C/C++ 实现状态机时最快的途径。状态函数可以放在 ROM 里,RAM 里只需存指针。- C++语言里,
异常抛出和捕捉例外和状态机的运行到完成(RTC) 语义基本上不相容。因为破坏了事件处理的原子性 监护条件和选择伪状态的实现就是把return Q_TRAN()改为条件判断函数,将切换状态的任务交给该函数QFsm_dispatch实现状态切换的方式是发送EXIT和ENTER事件(信号)给对应状态,这样状态可以在进入和退出时做一些事情,如初始化某些值,相关状态只需要在事件处理函数中实现对这类事件的处理。
层次式事件处理器的实现
下面只介绍和 FSM 实现不同的地方
层次式状态处理函数
一个层次式状态处理函数QStateHandler必须特别通知事件处理器有关状态嵌套层次的信息。
当一个层次式状态处理函数不处理当前的事件,它返回一个宏 Q_SUPER()给事件处理器,定义如下:
1
2
3
#define Q_RET_SUPER ((QState)3)
#define Q_SUPER(super_) \
(((QHsm *)me)->state = (QStateHandler)(super_), Q_RET_SUPER)
FSM 里不处理是返回Q_RET_IGNORED,因为没有超状态去处理它,HSM 里就需要返回Q_RET_SUPER
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
QState Calc_int1(Calc *me, QEvent const *e)
{
switch (e->sig)
{
case DIGIT_0_SIG: /* intentionally fall through */
case DIGIT_1_9_SIG:
{
BSP_insert(((CalcEvt const *)e)->key_code);
return Q_HANDLED();
}
case POINT_SIG:
{
BSP_insert(((CalcEvt const *)e)->key_code);
return Q_TRAN(&Calc_frac1);
}
}
return Q_SUPER(&Calc_operand1);
}
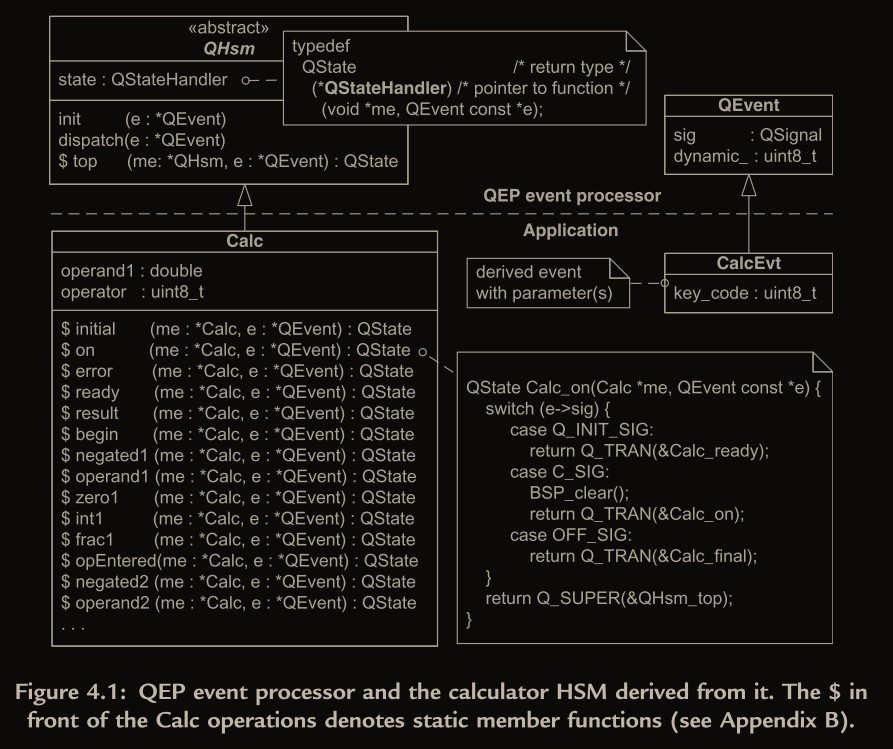
层次式状态机的类
QHsm 类
C 语言版本:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
typedef struct QHsmTag
{
QStateHandler state; /* current active state (state-variable) */
} QHsm; // 这里和FSM一样,事件处理函数的指针
#define QHsm_ctor(me_, initial_) ((me_)->state = (initial_))
void QHsm_init(QHsm *me, QEvent const *e);
// 分派事件
void QHsm_dispatch(QHsm *me, QEvent const *e);
// 测试HSM是否“在”一个给定的状态内,超状态包括子状态
uint8_t QHsm_isIn(QHsm *me, QHsmState state);
/**
* 函数QHsm_top( )是顶状态的层次式状态处理函数。
* 顶状态是 UML 的概念,表示状态层次的最终根。
* 顶状态处理函数对每一个事件的处理方法是静静的忽略它,
* 这是 UML 的默认方法
*/
QState QHsm_top(QHsm *me, QEvent const *e);
c 语言版本的不太直观,没有反应出继承关系,建议看 C++版本的
C++版本:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
class QHsm
{
protected:
QStateHandler m_state; // current active state (state-variable)
public:
void init(QEvent const *e = (QEvent const *)0);
void dispatch(QEvent const *e);
uint8_t isIn(QHsmState state);
protected:
QHsm(QStateHandler initial) : m_state(initial) {} // protected ctor
static QState top(QHsm *me, QEvent const *e);
};
其中top函数就是 C 版本中的QHsm_top,这里用了静态类型,这样子类继承后所有对象共享相同的 top 函数,也可以防止被重载。且 static 成员变量或函数在基类和派生类中是共用空间的,可以节省空间
除此之外的其他成员函数都是需要重载的
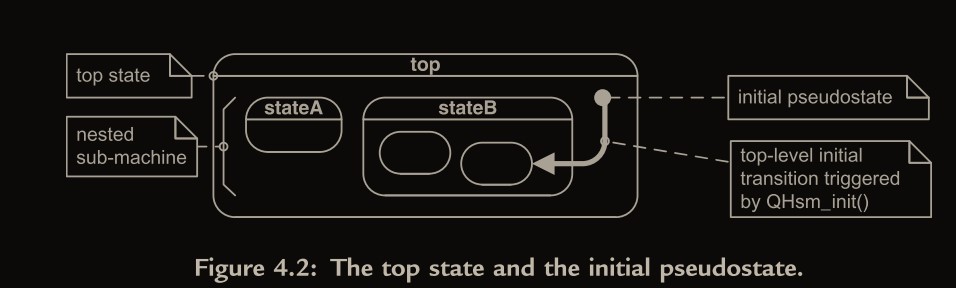
顶状态和初始伪状态
每一个 HSM 都有(典型的是隐含)顶状态 top,它围绕着整个状态机的全部其他元素
QHsm 类通过提供 QHsm_top() 层次式状态处理函数,然后由子类来继承它,从而确保顶状态对每一个派生的状态机都是可用的。 QHsm_top() 层次式状态处理函数定义如下:
1
2
3
4
5
6
7
8
9
// protected型的静态成员函数,子类都可调用,一般在子类处理事件时如果没有找到对应处理方式时调用
QState QHsm_top(QHsm *me, QEvent const *e)
{
// 避免编译器报未使用参数的警告,空引用一下
(void)me; /* avoid the compiler warning about unused parameter */
(void)e; /* avoid the compiler warning about unused parameter */
// 顶状态可以理解为一个虚状态,不做任何事,所以忽略掉事件
return Q_IGNORED(); /* the top state ignores all events */
}
状态机的初始化被特意分为 2 步。 QHsm 构造函数仅仅把状态变量初始化成初始伪状态。然后,应用程序代码必须通过调用QHsm_init()明确的触发初始转换。这个设计分割了状态机的实例化和初始化,让用户程序对系统的初始化顺序有完全的控制。
下一节有详细描述
以下代码展示了计算器状态机的一个初始伪状态处理函数的例子:
1
2
3
4
5
6
7
QState Calc_initial(Calc *me, QEvent const *e)
{
(void)e; /* avoid the compiler warning about unused parameter */
BSP_clear(); /* clear the calculator display */
// 初始化后必须转换到默认子状态的操作
return Q_TRAN(&Calc_on); /* designate the default state */
}
非叶子状态才有初始伪状态,离开状态再次进入会触发初始化
进入 / 退出动作和嵌套的初始转换
1
2
3
4
5
6
enum QReservedSignals {
Q_ENTRY_SIG = 1, /* signal for coding entry actions */
Q_EXIT_SIG, /* signal for coding exit actions */
Q_INIT_SIG, /* signal for coding initial transitions */
Q_USER_SIG /* first signal that can be used in user code */
};
状态处理函数能够通过把它们放在在 switch 语句的 case 后作为标签来处理它们。
状态处理函数可以任意执行任何动作去响应这些信号
限制条件:
进入动作Q_ENTRY_SIG和退出动作Q_EXIT_SIG中不能做任何状态转换初始化动作Q_INIT_SIG必须包括Q_TRAN()宏来转换到当前状态的默认子状态。
嵌套的初始转换必须“钻进”状态层次(直接或间接的子状态),但是不能“上升” 到目标超状态,或“绕道”到同级状态。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
QState Calc_on(Calc *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{ /* entry action */
BSP_message("on-ENTRY;");
return Q_HANDLED();
}
case Q_EXIT_SIG:
{ /* exit action */
BSP_message("on-EXIT;");
return Q_HANDLED();
}
case Q_INIT_SIG:
{ /* nested initial transition */
BSP_message("on-INIT;");
// 初始化后必须转换到子状态
return Q_TRAN(&Calc_ready);
}
case C_SIG:
{
BSP_clear();
return Q_TRAN(&Calc_on);
}
case OFF_SIG:
{
return Q_TRAN(&Calc_final);
}
}
// 无法处理时使用超状态处理
return Q_SUPER(&QHsm_top);
}
保留的信号占用最低的信号值( 0…3,进入退出和初始化),它们不能被应用程序使用。为了方便,公开的 HSM 接口包含了信号 Q_USER_SIG ,这是用户可以使用的第一个信号值。一个典型的定义应用程序级信号的方法是使用一个新的枚举值。这样 Q_USER_SIG 能被用于偏移全部新的枚举量
最顶层初始转换 (QHsm_init())
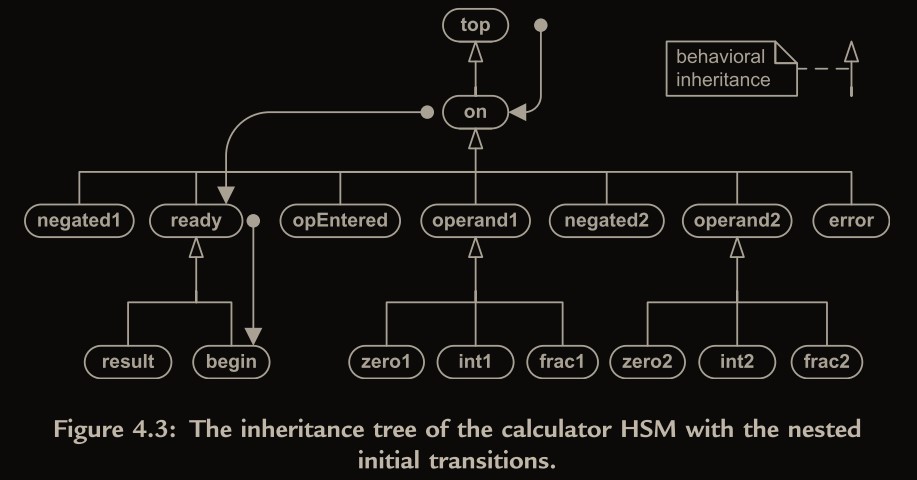
- 执行和最顶层转换关联的动作
- 执行进入动作到达默认子状态
on - 执行由状态
on定义的和初始转换关联的动作 - 执行进入动作到达默认子状态
ready - 执行由状态
ready定义的和初始转换关联的动作,进入begin - 执行和状态
begin关联的进入动作。在这一刻,转换已经完成,因为begin是没有嵌套的初始转换的叶状态。
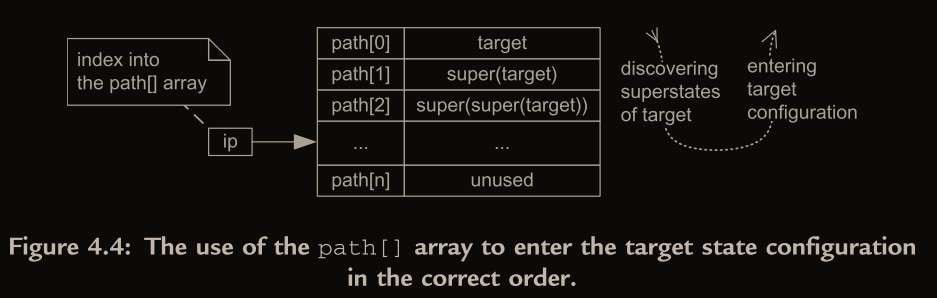
树状继承结构的优势是从叶结点返回到上层结点(如 top)很容易,但从上层结点进入到指定的目的结点却很复杂,因为要遍历寻找叶结点的父结点
QEP 里的解决方法是使用一个临时的数组 path[] 记录从初始状态的目标状态开始的退出路径而不执行任何动作(见图 4.4 )。通过使用保留的 QEP_EMPTY_SIG_ 信号来调用状态处理函数,令每一个状态处理函数不执行任何动作就立刻返回超状态。返回的路径被保存在 path[] 数组。在到达当前的状态后, path[] 数组被回访,精确的沿着它被退出的相反次序进入目标状态
使用 path[] 数组沿着正确的次序进入目标状态配置:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
#define QEP_TRIG_(state_, sig_) \
((*(state_))(me, &QEP_reservedEvt_[sig_]))
#define QEP_EXIT_(state_) \
if (QEP_TRIG_(state_, Q_EXIT_SIG) == Q_RET_HANDLED) { \
/* QS software tracing instrumentation for state entry */\
}
#define QEP_ENTER_(state_) \
if (QEP_TRIG_(state_, Q_ENTRY_SIG) == Q_RET_HANDLED) { \
/* QS software tracing instrumentation for state exit */\
}
void QHsm_init(QHsm *me, QEvent const *e)
{
QStateHandler t;
/* the top-most initial transition must be taken */
// 初始伪状态产生的初始转换(只改了state没有执行对应进入动作)
Q_ALLEGE((*me->state)(me, e) == Q_RET_TRAN);
// 临时保存源状态t(第一次为top)
t = (QStateHandler)&QHsm_top; /* HSM starts in the top state */
do
{ /* drill into the target... */
QStateHandler path[QEP_MAX_NEST_DEPTH_];
int8_t ip = (int8_t)0; /* transition entry path index */
// 临时存下目的状态,同时作为路径起点,前面做过状态转换,me->state已经是目的状态了
path[0] = me->state; /* save the target of the initial transition */
// 返回到超状态,利用QEP_EMPTY_SIG_信号
(void)QEP_TRIG_(me->state, QEP_EMPTY_SIG_);
// 直到回退到源状态t,这里都只是修改state没有触发进入退出动作
while (me->state != t)
{
// 保存路径
path[++ip] = me->state;
// 不断返回超状态,直到到达源状态
(void)QEP_TRIG_(me->state, QEP_EMPTY_SIG_);
}
// 路径记录完把状态恢复为目的状态(只改了state没有执行对应进入动作)
me->state = path[0]; /* restore the target of the initial tran. */
/* entry path must not overflow */
Q_ASSERT(ip < (int8_t)QEP_MAX_NEST_DEPTH_);
do
{/* retrace the entry path in reverse (desired) order... */
// 反向遍历路径,从源状态一层层进入目的状态(处理ENTER信号)
QEP_ENTER_(path[ip]); /* enter path[ip] */
} while ((--ip) >= (int8_t)0);
// 临时保存源状态t(就是本循环一开始的目的状态,在下个循环里就是源状态了)
// 现在来看是等于me->state的,因为上面也给me->state赋值了
t = path[0]; /* current state becomes the new source */
// 如果本次循环抵达的目的状态不是叶状态,还要继续深入
} while (QEP_TRIG_(t, Q_INIT_SIG) == Q_RET_TRAN);
// 直到当前状态为叶状态
me->state = t;
}
QEP 内定义的断言宏:
- Q_REQUIRE(),断言一个前置条件
- Q_ENSURE() ,断言一个后置条件
- Q_INVARIANT() ,断言一个不变量
- Q_ASSERT() ,断言一个其他类型的一般性契约
- Q_ALLEGE,断言一个一般性的契约,而且即使在编译时间断言被禁止了也评估当前的情况。
分派事件( QHsm_dispatch(), 通用结构)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
void QHsm_dispatch(QHsm *me, QEvent const *e)
{
QStateHandler path[QEP_MAX_NEST_DEPTH_];
QStateHandler s;// source源状态
QStateHandler t;// target目的状态
QState r;
// 临时保存当前状态,后面作为源状态
t = me->state; /* save the current state */
// 执行对应状态事件处理函数,如果返回Q_RET_SUPER说明交给了超状态处理,
// 此时继续执行,直到某个超状态处理了该事件
do
{ /* process the event hierarchically... */
s = me->state;
r = (*s)(me, e); /* invoke state handler s */
} while (r == Q_RET_SUPER);
// 当需要转换状态时,源状态必须为处理该事件的状态,
// 所以如果处理事件的状态为超状态而非当前状态,
// 当前状态必须切换为该超状态,也就是返回到该超状态
if (r == Q_RET_TRAN)
{ /* transition taken? */
int8_t ip = (int8_t)(-1); /* transition entry path index */
int8_t iq; /* helper transition entry path index */
// 路径0赋值为目的状态
path[0] = me->state; /* save the target of the transition */
// 路径1赋值为源状态
path[1] = t;
// s状态就是实际处理了该事件的状态
// s状态可能是源状态,也可能是源状态的某个超状态
// 如果当前状态不为s状态时,当前状态退出直到s状态
while (t != s)
{ /* exit current state to transition source s... */
// 退出源状态
if (QEP_TRIG_(t, Q_EXIT_SIG) == Q_RET_HANDLED)
{ /*exit handled? */
// 退出成功时返回到超状态
(void)QEP_TRIG_(t, QEP_EMPTY_SIG_); /* find superstate of t */
}
// t赋值为该超状态
t = me->state; /* me->state holds the superstate */
}
// 最后t==s,执行状态切换动作(下一节讲)
...
}
me->state = t; /* set new state or restore the current state */
}
对if (r == Q_RET_TRAN)的解释:当需要转换状态时,源状态必须为处理该事件的状态,所以如果处理事件的状态为超状态而非当前状态,当前状态必须切换为该超状态,也就是返回到该超状态
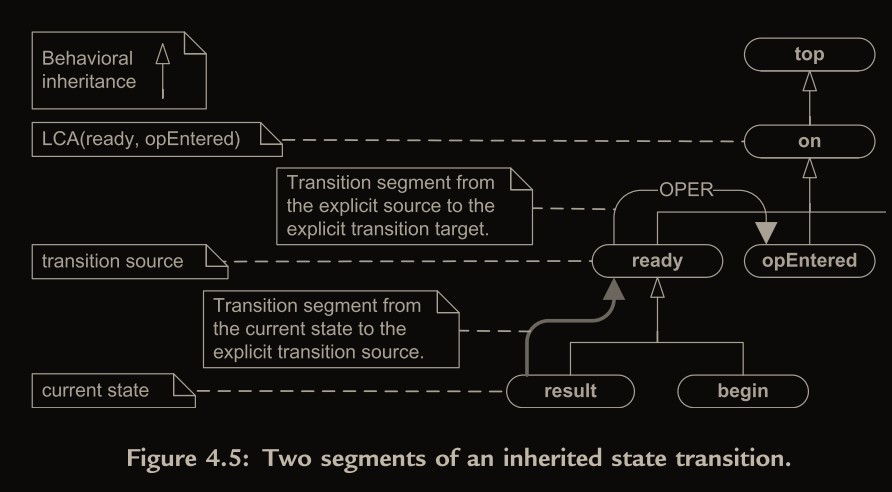
本图中 result 收到的 OPER 事件被交给 ready 处理,ready 对事件的处理需要转换状态到 opEntered,所以必须将当前状态转变为 ready,也就是退出 result(此时不触发 ready 的 init,可以不把这个操作理解成标准的状态切换,因为本身 ready 也是临时状态,马上要切换成其他状态了),然后触发状态切换从 ready 到 opEntered
在状态机里实施一个转换( QHsm_dispatch(), 转换)
上一节是找路径,这一节是沿着路径做转换
在 HSM 里执行一个通用的状态转换,到目前为止是 QEP 实现的最复杂的部分。挑战是最快的找到源状态和目标状态的最少共同祖先 (LCA) 状态。 (LCA 是同时源状态和目标状态的超状态里的最低层次的状态 ) 。
然后转换序列牵涉到所有状态的退出动作,向上到达LCA(但是不退出 LCA本身),然后是递归的进入到目标状态,然后使用初始转换“钻入”到目标状态配置,直到到达一个叶状态为止。
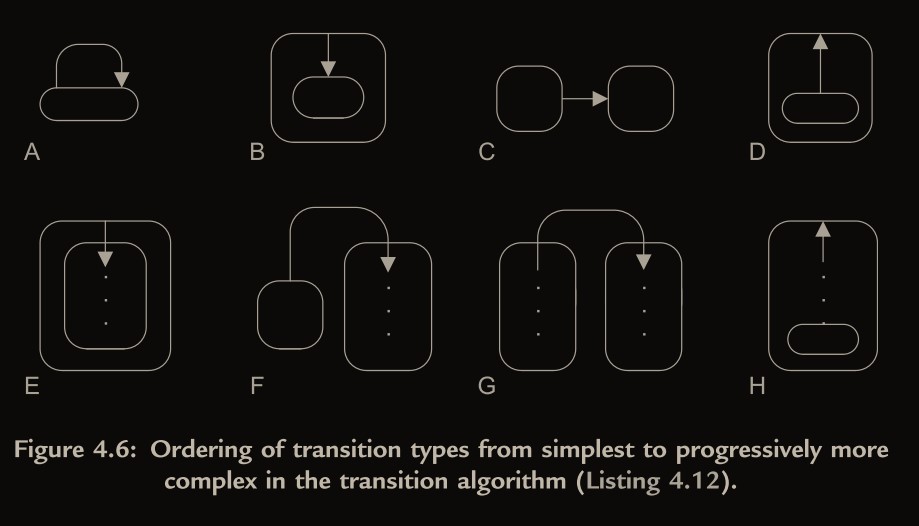
h: 子状态到超状态的超状态
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
/* NOTE: 上一节代码省略部分 */
// 路径0保存了目的状态,给t赋值,t等于me->state
t = path[0]; /* target of the transition */
// 如果源状态等于目的状态,相当于自转换,情况(a)适用
if (s == t)
{ /* (a) check source==target (transition to self) */
QEP_EXIT_(s) /* exit the source */
ip = (int8_t)0; /* enter the target */
}
else
{
// t(等于当前状态me->state)退出到超状态
// 使用t作为参数,会忽略me->state原有值,执行后强制赋值,
// 如此处给空信号返回超状态,me->state强制赋值为t的超状态
(void)QEP_TRIG_(t, QEP_EMPTY_SIG_); /* superstate of target */
// 为t赋值当前状态(目的状态的超状态)
t = me->state;
// 情况(b),目的状态的超状态为源状态,超状态进入子状态(源状态不用退出)
if (s == t)
{ /* (b) check source==target->super */
ip = (int8_t)0; /* enter the target */
}
else
{
// 退出到s的超状态,为me->state强制赋值
(void)QEP_TRIG_(s, QEP_EMPTY_SIG_); /* superstate of src */
/* (c) check source->super==target->super */
// 情况(c),源状态的超状态等于目的状态的超状态
if (me->state == t)
{
QEP_EXIT_(s) /* exit the source */
ip = (int8_t)0; /* enter the target */
}
else
{
/* (d) check source->super==target */
// 情况(d),源超状态等于目的状态
if (me->state == path[0])
{
QEP_EXIT_(s) /* exit the source */
}
else
{ /* (e) check rest of source==target->super->super..
* and store the entry path along the way
*/
iq = (int8_t)0; /* indicate that LCA not found */
ip = (int8_t)1; /* enter target and its superstate */
path[1] = t; /* save the superstate of target */
t = me->state; /* save source->super */
/* find target->super->super */
r = QEP_TRIG_(path[1], QEP_EMPTY_SIG_);
while (r == Q_RET_SUPER)
{
path[++ip] = me->state; /* store the entry path */
if (me->state == s)
{ /* is it the source? */
iq = (int8_t)1; /* indicate that LCA found */
/* entry path must not overflow */
Q_ASSERT(ip < (int8_t)QEP_MAX_NEST_DEPTH_);
--ip; /* do not enter the source */
r = Q_RET_HANDLED; /* terminate the loop */
}
else
{ /* it is not the source, keep going up */
r = QEP_TRIG_(me->state, QEP_EMPTY_SIG_);
}
}
if (iq == (int8_t)0)
{ /* the LCA not found yet? */
/* entry path must not overflow */
Q_ASSERT(ip < (int8_t)QEP_MAX_NEST_DEPTH_);
QEP_EXIT_(s) /* exit the source */
/* (f) check the rest of source->super
* == target->super->super...
*/
iq = ip;
r = Q_RET_IGNORED; /* indicate LCA NOT found */
do
{
if (t == path[iq])
{ /* is this the LCA? */
r = Q_RET_HANDLED; /* indicate LCA found */
ip = (int8_t)(iq - 1); /*do not enter LCA*/
iq = (int8_t)(-1); /* terminate the loop */
}
else
{
--iq; /* try lower superstate of target */
}
} while (iq >= (int8_t)0);
if (r != Q_RET_HANDLED)
{ /* LCA not found yet? */
/* (g) check each source->super->...
* for each target->super...
*/
r = Q_RET_IGNORED; /* keep looping */
do
{
/* exit t unhandled? */
if (QEP_TRIG_(t, Q_EXIT_SIG) == Q_RET_HANDLED)
{
(void)QEP_TRIG_(t, QEP_EMPTY_SIG_);
}
t = me->state; /* set to super of t */
iq = ip;
do
{
if (t == path[iq])
{ /* is this LCA? */
/* do not enter LCA */
ip = (int8_t)(iq - 1);
iq = (int8_t)(-1); /*break inner */
r = Q_RET_HANDLED; /*break outer */
}
else
{
--iq;
}
} while (iq >= (int8_t)0);
} while (r != Q_RET_HANDLED);
}
}
}
}
}
}
/* retrace the entry path in reverse (desired) order... */
for (; ip >= (int8_t)0; --ip)
{
QEP_ENTER_(path[ip]) /* enter path[ip] */
}
t = path[0]; /* stick the target into register */
me->state = t; /* update the current state */
/* drill into the target hierarchy... */
while (QEP_TRIG_(t, Q_INIT_SIG) == Q_RET_TRAN)
{
ip = (int8_t)0;
path[0] = me->state;
(void)QEP_TRIG_(me->state, QEP_EMPTY_SIG_); /* find superstate */
while (me->state != t)
{
path[++ip] = me->state;
(void)QEP_TRIG_(me->state, QEP_EMPTY_SIG_); /*find superstate*/
}
me->state = path[0];
/* entry path must not overflow */
Q_ASSERT(ip < (int8_t)QEP_MAX_NEST_DEPTH_);
do
{ /* retrace the entry path in reverse (correct) order... */
QEP_ENTER_(path[ip]) /* enter path[ip] */
} while ((--ip) >= (int8_t)0);
t = path[0];
}
使用 QEP 实现 HSM 步骤的概要
计算器认识的按键是: 0 , 1-9 , . , + , - , * , / , = , C 和 E(cancel entry CE) 。ESC 按键终止程序。其他别的按键会被忽略。
- 枚举信号,如 C, CE , DIGIT_0 , DIGIT_1_9 等待
定义事件,如
OPER_SIG信号对应按下+ , - , * , / 的四个事件,事件参数在 key_code 变量中1 2 3
struct CalcEvt : public QEvent { uint8_t key_code; };
派生特定的状态机
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
class Calc : public QHsm { private: double m_operand1; // the value of operand 1 (extended state variable) uint8_t m_operator; // operator key entered (extended state variable) public: Calc() : QHsm((QStateHandler)&Calc::initial) { // ctor } protected: // 声明为静态,如果有扩展派生类也能共享 static QState initial(Calc *me, QEvent const *e); // initial pseudostate static QState on(Calc *me, QEvent const *e); // state handler static QState error(Calc *me, QEvent const *e); // state handler static QState ready(Calc *me, QEvent const *e); // state handler static QState result(Calc *me, QEvent const *e); // state handler static QState begin(Calc *me, QEvent const *e); // state handler static QState negated1(Calc *me, QEvent const *e); // state handler static QState operand1(Calc *me, QEvent const *e); // state handler static QState zero1(Calc *me, QEvent const *e); // state handler static QState int1(Calc *me, QEvent const *e); // state handler static QState frac1(Calc *me, QEvent const *e); // state handler static QState opEntered(Calc *me, QEvent const *e); // state handler static QState negated2(Calc *me, QEvent const *e); // state handler static QState operand2(Calc *me, QEvent const *e); // state handler static QState zero2(Calc *me, QEvent const *e); // state handler static QState int2(Calc *me, QEvent const *e); // state handler static QState frac2(Calc *me, QEvent const *e); // state handler static QState final(Calc *me, QEvent const *e); // state handler };
定义初始伪状态,作用是执行一些初始化操作,还有转换到默认状态 on
1 2 3 4 5
QState Calc::initial(Calc *me, QEvent const * /* e */) { BSP_clear(); return Q_TRAN(&Calc::on); }
定义状态处理函数
用 switch 处理信号,避免
switch外的处理代码- Q_ENTRY_SIG 和 Q_EXIT_SIG:进入动作和退出动作,总是返回 Q_HANDLED(),
不允许状态切换 - Q_INIT_SIG:每个
组合状态(带有子状态的状态)能有它自己的初始转换,初始转换不能有监护条件,初始转换只能以自己的子状态作为目的状态 - 内部转换:内部转换是对事件的简单反应,并从
不导致状态的转换,因此也从不导致进入动作,退出动作或初始转换的执行,总是返回 Q_HANDLED() - 常规转换:执行动作,返回 Q_TRAN()
- 监护条件:根据事件参数的值和 / 或和状态机联合的变量(扩展状态变量)来
动态的评估。条件为 false 相当于没处理,需要抛给超状态处理
- Q_ENTRY_SIG 和 Q_EXIT_SIG:进入动作和退出动作,总是返回 Q_HANDLED(),
常见问题
不完整的状态处理函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
QState Calc_on(Calc *me, QEvent const *e) { switch (e->sig) { ...case C_SIG: { // case里应该return一个预定义的QState值,如Q_HANDLED(), // 这里却是一个自定义函数,虽然结果相同,但代码不直观,违反了设计规范 return Calc_onClear(me); /* handle the Clear event */ } ... } return Q_SUPER(&QHsm_top); } ...QState Calc_onClear(Calc *me) { BSP_clear(); return Q_TRAN(&Calc_on); /* transition to "on" */ }
在进入 / 退出动作或初始转换内访问事件参数
处理 Q_ENTRY_SIG 信号时不应该访问 QEvent 参数,需要在切换时传递的参数可以定义为该状态机的全局变量(如上面的
m_operand1),这样状态机里所有状态都能共享不够优化的信号粒度
计算器状态图把数字 1 到 9 的群表示为一个信号
IDC_1_9_SIG,而不是每个数字一个信号,这样增加了一步读取事件参数获得实际值的操作,但减少了信号数量,总体上增大了信号粒度,避免过细的信号粒度带来的复杂性过大的信号粒度会导致一个 case 里写的条件判断过多(switch 套 switch),让代码变成意大利面条
状态模式
状态机面向对象的设计模式,设计模式就是用于解决实际问题的最佳实践
终极钩子
- 目的
提供共同的设施和方式来处理事件但是让客户重载 (override)并定制系统行为的每一个方面。
- 问题
许多事件驱动型系统需要一致性方式来处理事件。在一个 GUI 设计里,一致性是用户接口的典型性观感的一部分。挑战是在系统层软件要提供这样一种共同的观感,客户程序可以容易的默认方式使用它们。 同时,客户必须能够容易的重载默认行为的每一个方面,如果他们想这么做的话
- 解决方案
使用一个子状态,能够继承父状态的默认方法(忽略事件并让父状态处理),也能重载产生自定义的方法(编写事件的处理方法)

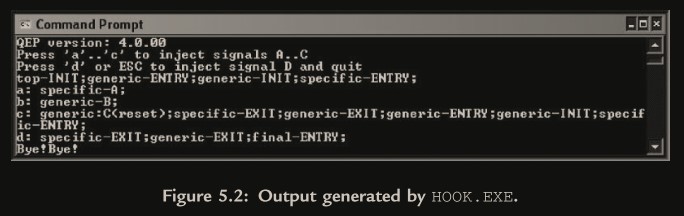
specific 重载了 A 事件和进入退出动作的处理,B、C、D 事件则继承父状态的处理
其中 C 事件表示复位,D 事件表示终止
- 代码样本
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
// QEP应用需要qep_port.h
#include "qep_port.h"
typedef struct UltimateHookTag
{ /* UltimateHook state machine */
QHsm super; /* derive from QHsm */
} UltimateHook;
void UltimateHook_ctor(UltimateHook *me); /* ctor */
QState UltimateHook_initial(UltimateHook *me, QEvent const *e);
QState UltimateHook_generic(UltimateHook *me, QEvent const *e);
QState UltimateHook_specific(UltimateHook *me, QEvent const *e);
QState UltimateHook_final(UltimateHook *me, QEvent const *e);
enum UltimateHookSignals
{ /* enumeration of signals */
A_SIG = Q_USER_SIG,
B_SIG,
C_SIG,
D_SIG
};
/*.............................................................*/
void UltimateHook_ctor(UltimateHook *me)
{
QHsm_ctor(&me->super, (QStateHandler)&UltimateHook_initial);
}
/*.............................................................*/
QState UltimateHook_initial(UltimateHook *me, QEvent const *e)
{
printf("top-INIT;");
return Q_TRAN(&UltimateHook_generic);
}
/*.............................................................*/
QState UltimateHook_final(UltimateHook *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("final-ENTRY(terminate);\nBye!Bye!\n");
exit(0);
return Q_HANDLED();
}
}
return Q_SUPER(&QHsm_top);
}
/*............................................................*/
QState UltimateHook_generic(UltimateHook *me, QEvent const *e)
{
switch (e->sig)
{
...
case Q_INIT_SIG:
{
printf("generic-INIT;");
return Q_TRAN(&UltimateHook_specific);
}
case A_SIG:
{
printf("generic-A;");
return Q_HANDLED();
}
case B_SIG:
{
printf("generic-B;");
return Q_HANDLED();
}
case C_SIG:
{
printf("generic-C(reset);");
return Q_TRAN(&UltimateHook_generic);
}
case D_SIG:
{
return Q_TRAN(&UltimateHook_final);
}
}
return Q_SUPER(&QHsm_top);
}
/*............................................................*/
QState UltimateHook_specific(UltimateHook *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("specific-ENTRY;");
return Q_HANDLED();
}
case Q_EXIT_SIG:
{
printf("specific-EXIT;");
return Q_HANDLED();
}
case A_SIG:
{
printf("specific-A;");
return Q_HANDLED();
}
}
// 默认使用超状态处理,类似于继承
return Q_SUPER(&UltimateHook_generic); /* the superstate */
}
结论
- specific 子状态只需要知道它将重载的事件。
- 可以容易的加入新事件到高层 generic 超状态而不会影响 specific 子状态。
- 难以去掉或者改变客户已经在使用的事件的语义。(见设计模式中的开闭原则,对扩展开放,对修改关闭,本来就应该这么做,其实这个不算问题)
- 在许多嵌套层次间(如果 specific 子状态有
嵌套的子状态)传递每一个事件的成本很高。
提示器
- 目的
通过创造并发送给本身一个事件而使状态图拓扑更加灵活。
- 问题
在状态建模时,一个公共事件常常把系统的一些松散的功能很强的耦合起来。考虑这个例子,在周期性数据采集时需要在一个预定的速率查询一个传感器产生的数据。假设一个周期性 TIMEOUT 事件以一个需要的速率被派发给系统用来提供查询传感器的触发。因为系统仅有一个外部事件 (TIMEOUT 事件) , 看来好像这个事件需要同时触发查询传感器功能和处理数据功能。一个直接的但是不够优化的解决方法是把状态机组织成 2 个不同的正交区域(用来查询和处理)。然而,正交区域增加了派发事件的成本(参考“正交组件”模式)并且需要在区域间复杂的同步,因为查询和处理并不是完全独立的。
- 解决方法
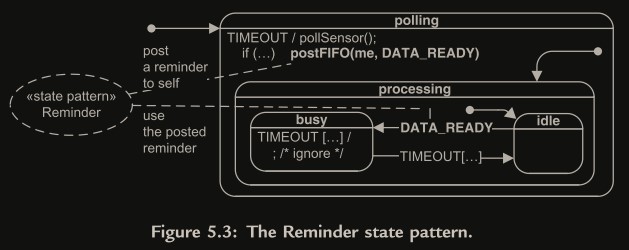
使用一个 DATA_READY 事件用于传给自己,表示数据就绪。
将“处理数据功能”(processing)作为“查询传感器功能”(polling)的子状态,继承 TIMEOUT 事件的处理方法 pollSensor(),busy作为 polling 子状态可以重载 TIMEOUT,以便实现自定义功能。例如,为了提供性能, polling 状态可以缓存原始传感器数据并仅在缓存区填满后在生成 DATA_READY 事件,图中展示了使用 if(…) 条件的这个选项,它在 polling 状态的 postFIFO(me, DATA_REDY) 的前面。
本例有个特征,就是周期性查询和周期性处理虽然都需要共用定时事件,但实时性不同,周期性查询比较频繁需要实时,周期性处理甚至不需要实时处理,所以可以仅让周期性查询处理定时事件,使用另一个 DATA_READY 事件让周期性查询通知周期性处理何时能进行处理
也就是仅让 polling 处理 TIMEOUT 事件,因为 processing 状态不需要频繁处理数据,可以在 idle 状态等待,直到 DATA_READY 事件发生变为 busy 开始处理数据
- 代码样本
原生 QEP 事件处理器并不支持事件排队,这里用到了 QP 实时框架 QF,还利用了 QF 的定时组件
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
#include "qp_port.h" /* QP interface */
#include "bsp.h" /* board support package */
enum SensorSignals
{
TIMEOUT_SIG = Q_USER_SIG, /* the periodic timeout signal */
DATA_READY_SIG, /* the invented reminder signal */
TERMINATE_SIG /* terminate the application */
};
/*............................................................*/
// 使用了QF中的QActive活动对象和QTimeEvt定时组件
typedef struct SensorTag
{ /* the Sensor active object */
QActive super; /* derive from QActive */
QTimeEvt timeEvt; /* private time event generator */
uint16_t pollCtr;
uint16_t procCtr;
} Sensor;
void Sensor_ctor(Sensor *me);
/* hierarchical state machine ... */
QState Sensor_initial(Sensor *me, QEvent const *e);
QState Sensor_polling(Sensor *me, QEvent const *e);
QState Sensor_processing(Sensor *me, QEvent const *e);
QState Sensor_idle(Sensor *me, QEvent const *e);
QState Sensor_busy(Sensor *me, QEvent const *e);
QState Sensor_final(Sensor *me, QEvent const *e);
/*............................................................*/
void Sensor_ctor(Sensor *me)
{
QActive_ctor_(&me->super, (QStateHandler)&Sensor_initial);
QTimeEvt_ctor(&me->timeEvt, TIMEOUT_SIG); /* time event ctor */
}
/* HSM definition----------------------------------------------*/
QState Sensor_initial(Sensor *me, QEvent const *e)
{
me->pollCtr = 0;
me->procCtr = 0;
return Q_TRAN(&Sensor_polling);
}
/*............................................................*/
QState Sensor_final(Sensor *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("final-ENTRY;\nBye!Bye!\n");
BSP_exit(); /* terminate the application */
return Q_HANDLED();
}
}
return Q_SUPER(&QHsm_top);
}
/*............................................................*/
QState Sensor_polling(Sensor *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
// 注册定时事件,每半秒一次
/* periodic timeout every 1/2 second */
QTimeEvt_postEvery(&me->timeEvt, (QActive *)me,
BSP_TICKS_PER_SEC / 2);
return Q_HANDLED();
}
case Q_EXIT_SIG:
{
QTimeEvt_disarm(&me->timeEvt);
return Q_HANDLED();
}
case Q_INIT_SIG:
{
// 初始进入processing状态
return Q_TRAN(&Sensor_processing);
}
// processing和idle都交给本状态处理,busy重载了这个处理
case TIMEOUT_SIG:
{
static const QEvent reminderEvt = {DATA_READY_SIG, 0};
++me->pollCtr;
printf("polling %3d\n", me->pollCtr);
// 每4次发送一个DATA_READY事件
if ((me->pollCtr & 0x3) == 0)
{ /* modulo 4 */
QActive_postFIFO((QActive *)me, &reminderEvt);
}
return Q_HANDLED();
}
case TERMINATE_SIG:
{
return Q_TRAN(&Sensor_final);
}
}
return Q_SUPER(&QHsm_top);
}
/*............................................................*/
QState Sensor_processing(Sensor *me, QEvent const *e)
{
switch (e->sig)
{
case Q_INIT_SIG:
{
// 初始进入idle状态
return Q_TRAN(&Sensor_idle);
}
}
return Q_SUPER(&Sensor_polling);
}
/*..............................................................*/
QState Sensor_idle(Sensor *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("idle-ENTRY;\n");
return Q_HANDLED();
}
case DATA_READY_SIG:
{
return Q_TRAN(&Sensor_busy);
}
}
return Q_SUPER(&Sensor_processing);
}
/*..............................................................*/
QState Sensor_busy(Sensor *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("busy-ENTRY;\n");
return Q_HANDLED();
}
// busy重载了定时处理
case TIMEOUT_SIG:
{
++me->procCtr;
printf("processing %3d\n", me->procCtr);
// 处理完返回idle,TODO:这里不处理采集的话不就丢了一次采集吗
if ((me->procCtr & 0x1) == 0)
{ /* modulo 2 */
return Q_TRAN(&Sensor_idle);
}
return Q_HANDLED();
}
}
return Q_SUPER(&Sensor_processing);
}
- 结论
很像监护条件,但是监护条件是明确的,对应的事件就是用于转换状态的,但这里转换状态是隐含的,称为补充性转换。通过创造一个自定义的内部事件,在满足某种条件并产生隐式转换时发送该事件给自己,即可实现明确的转换。
提醒器模式的另一个重要的应用是把较长的 RTC 步骤分解为较短的几个步骤。通过在内部事件中携带上下文可以让下一个短步骤获取上个短步骤留下的上下文,从而让这些短步骤能衔接起来,看上去像是一个连续执行的长步骤。通过分解和 FIFO 事件排队,能让其他任务也能及时运行而不受长步骤影响。
延迟的事件
- 目的
通过改变事件的顺序来简化状态机。
- 问题
有时候一个事件在某个不方便的时刻到达,这时刻系统正在某个复杂的事件队列的中间。
复杂的事件队列指一系列不应该被打断的事件,如发送请求、等待收到回复事件后处理回复,两个事件不是同时发生,但中间也不希望被插入新事件打断
实例:服务器程序处理业务(如从 ATM 终端)的案例。一旦业务开始了,它典型地要走完一个处理序列,从一个远距离终端接受数据开始,然后是业务的授权。这几个事件被视为连续事件,虽然事件产生有一定时间间隔,但希望它们能连续执行而不应该被新到达的业务打断。(可以理解为中断,中断的话需要保存上下文,退出中断后恢复,同理状态机处理“中断”也要保存当前状态和上下文,等新事件处理完恢复,太麻烦了。这个正好和上面一节的拆分长步骤的例子相反,一个是希望拆分长步骤为短步骤,让其他任务也能及时运行,这里是希望各个短步骤看上去像长步骤一样中间不要被打断。)
- 解决
添加一个等待队列,当新业务事件到达时加入这个队列而不是事件队列,在 idle 时再去读取等待队列,把等待队列里的事件加入事件队列
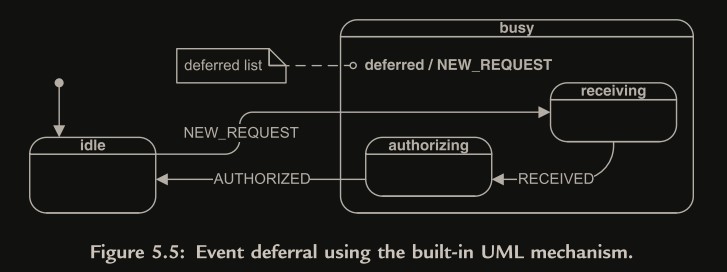
处于 busy 状态的子状态(receiving 和 authorizing)时,收到新的请求事件,处理方法为不执行并加入等待队列,然后该事件会被移除出事件队列,原业务得以继续正常执行。idle 状态通过进入动作执行 recall() 从等待队列召回被等待的第一个事件,并发送给自己。
- 实例代码
延迟事件状态模式严重依赖事件队列,所以用了 QF 框架
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
#include "qp_port.h"
#include "bsp.h"
/*.......................................................................*/
enum TServerSignals
{
NEW_REQUEST_SIG = Q_USER_SIG, /* the new request signal */
RECEIVED_SIG, /* the request has been received */
AUTHORIZED_SIG, /* the request has been authorized */
TERMINATE_SIG /* terminate the application */
};
/*......................................................................*/
typedef struct RequestEvtTag
{
QEvent super; /* derive from QEvent */
uint8_t ref_num; /* reference number of the request */
} RequestEvt;
/*......................................................................*/
typedef struct TServerTag
{ /* Transaction Server active object */
QActive super; /* derive from QActive */
// 私用事件队列,用于等待队列
QEQueue requestQueue; /* native QF queue for deferred request events */
// 指针数组,存放了3个指针,用于QEQueue事件队列,只要指针就行,指针指向的空间由QF管理是运行时绑定的
QEvent const *requestQSto[3]; /* storage for the deferred queue buffer */
// 使用定时任务模拟延迟
QTimeEvt receivedEvt; /* private time event generator */
QTimeEvt authorizedEvt; /* private time event generator */
} TServer;
void TServer_ctor(TServer *me); /* the default ctor */
/* hierarchical state machine ... */
QState TServer_initial(TServer *me, QEvent const *e);
QState TServer_idle(TServer *me, QEvent const *e);
QState TServer_busy(TServer *me, QEvent const *e);
QState TServer_receiving(TServer *me, QEvent const *e);
QState TServer_authorizing(TServer *me, QEvent const *e);
QState TServer_final(TServer *me, QEvent const *e);
/*......................................................................*/
void TServer_ctor(TServer *me)
{ /* the default ctor */
QActive_ctor(&me->super, (QStateHandler)&TServer_initial);
// 私有等待队列初始化
QEQueue_init(&me->requestQueue,
me->requestQSto, Q_DIM(me->requestQSto));
QTimeEvt_ctor(&me->receivedEvt, RECEIVED_SIG);
QTimeEvt_ctor(&me->authorizedEvt, AUTHORIZED_SIG);
}
/* HSM definition -------------------------------------------------------*/
QState TServer_initial(TServer *me, QEvent const *e)
{
(void)e; /* avoid the compiler warning about unused parameter */
return Q_TRAN(&TServer_idle);
}
/*......................................................................*/
QState TServer_final(TServer *me, QEvent const *e)
{
(void)me; /* avoid the compiler warning about unused parameter */
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("final-ENTRY;\nBye!Bye!\n");
BSP_exit(); /* terminate the application */
return Q_HANDLED();
}
}
return Q_SUPER(&QHsm_top);
}
/*............................................................................*/
QState TServer_idle(TServer *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
// 在idle的进入动作中尝试召回事件
RequestEvt const *rq;
printf("idle-ENTRY;\n");
/* recall the request from the private requestQueue */
// 使用QF框架提供的recall()功能召回,recall()内部通过LIFO将等待队列里的事件发给
// 自己的事件队列,用LIFO是为了保证优先处理
rq = (RequestEvt const *)QActive_recall((QActive *)me,
&me->requestQueue);
if (rq != (RequestEvt *)0)
{ /* recall posted an event? */
printf("Request #%d recalled\n", (int)rq->refNum);
}
else
{
printf("No deferred requests\n");
}
return Q_HANDLED();
}
case NEW_REQUEST_SIG:
{
printf("Processing request #%d\n",
(int)((RequestEvt const *)e)->refNum);
return Q_TRAN(&TServer_receiving);
}
case TERMINATE_SIG:
{
return Q_TRAN(&TServer_final);
}
}
return Q_SUPER(&QHsm_top);
}
/*......................................................................*/
QState TServer_busy(TServer *me, QEvent const *e)
{
switch (e->sig)
{
case NEW_REQUEST_SIG:
{
// busy状态下收到新的REQUEST事件,先检查等待队列是否空闲,
if (QEQueue_getNFree(&me->requestQueue) > 0)
{ /* can defer? */
/* defer the request */
// 为空就加入等待队列,用QF框架自带的QActive_defer
QActive_defer((QActive *)me, &me->requestQueue, e);
printf("Request #%d deferred;\n",
(int)((RequestEvt const *)e)->ref_num);
}
else
{
/* notify the request sender that the request was ignored.. */
// 满了就提醒用户,对QF框架来说等待队列和事件队列都是不允许满了丢弃的,会断言退出
// 这里修改了QF框架,允许满了后丢弃
printf("Request #%d IGNORED;\n",
(int)((RequestEvt const *)e)->ref_num);
}
return Q_HANDLED();
}
case TERMINATE_SIG:
{
return Q_TRAN(&TServer_final);
}
}
return Q_SUPER(&QHsm_top);
}
/*.....................................................................*/
QState TServer_receiving(TServer *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("receiving-ENTRY;\n");
/* one-shot timeout in 1 second */
QTimeEvt_fireIn(&me->receivedEvt, (QActive *)me,
BSP_TICKS_PER_SEC);
return Q_HANDLED();
}
case Q_EXIT_SIG:
{
QTimeEvt_disarm(&me->receivedEvt);
return Q_HANDLED();
}
case RECEIVED_SIG:
{
return Q_TRAN(&TServer_authorizing);
}
}
return Q_SUPER(&TServer_busy);
}
/*.....................................................................*/
QState TServer_authorizing(TServer *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("authorizing-ENTRY;\n");
/* one-shot timeout in 2 seconds */
QTimeEvt_fireIn(&me->authorizedEvt, (QActive *)me,
2 * BSP_TICKS_PER_SEC);
return Q_HANDLED();
}
case Q_EXIT_SIG:
{
QTimeEvt_disarm(&me->authorizedEvt);
return Q_HANDLED();
}
case AUTHORIZED_SIG:
{
return Q_TRAN(&TServer_idle);
}
}
return Q_SUPER(&TServer_busy);
}
等待队列和事件队列的管理都由 QF 实现,使用了“零复制”方式。
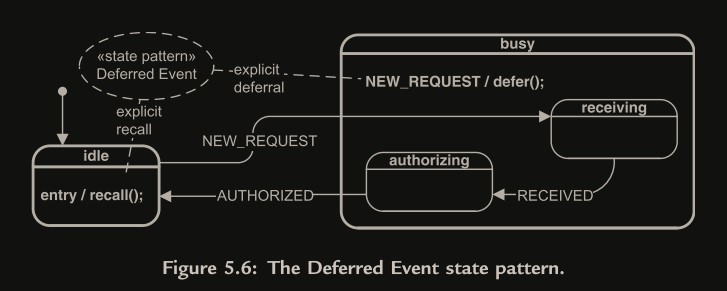
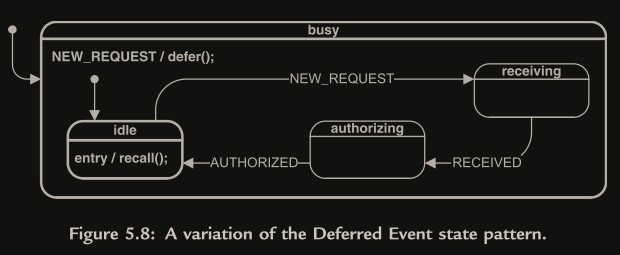
一种变体:
busy 状态变成了其他状态包括 idle 的超状态。 idle 子状态重载了 NEW_REQUEST 事件。 其他全部 busy 的子状态依赖在 busy 超状态的默认事件处理方法,这个方法会延迟 NEW_REQUEST 事件。相当于就是把 idle 放进了 busy,其他都一样,TODO:这样有什么好处,busy 和 idle 从意义上讲应该是互斥的,这样做是否违反了逻辑
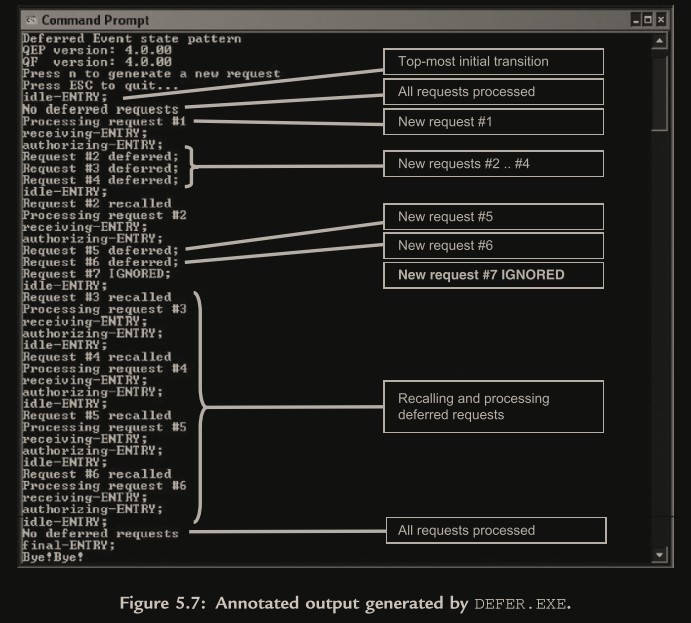
按键触发新事件的代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
void BSP_onConsoleInput(uint8_t key)
{
switch (key)
{
case 'n':
{ /* new request */
static uint8_t reqCtr = 0; /* count the requests */
RequestEvt *e = Q_NEW(RequestEvt, NEW_REQUEST_SIG);
e->ref_num = (++reqCtr); /* set the reference number */
/* post directly to TServer active object */
QActive_postFIFO((QActive *)&l_tserver, (QEvent *)e);
break;
}
case 0x1B:
{ /* ESC key */
static QEvent const terminateEvt = {TERMINATE_SIG, 0};
QActive_postFIFO((QActive *)&l_tserver, &terminateEvt);
break;
}
}
}
结论
事件延迟是个
简化状态模型的有价值的技术。你不用建立一个过份复杂的状态机去处理在任何时候的每个事件,而是可以延迟一个在不合适或者棘手的时刻到达的事件。当状态机可以处理它时这个事件被召回。- 它需要
明确的延迟和召回被延迟的事件。 QF实时框架提供了类属defer()和recall()操作。- 如果一个状态机延迟了一个以上的事件,它可以使用同样的事件队列 (QEQueue) 或为不同的事件使用不同的事件队列。类属 QF 操作 defer() 和 recall() 支持这 2 个选项。
- 如果事件在一个高层状态被延迟,这通常发生在这个状态的某个内部转换中。
- 在这个状态的
进入动作是这个事件被召回,可以方便的处理这个被延迟事件类型。 - 事件不应该在它被明确的召回时处理(要先加入事件队列,QF 会处理)。因为, recall() 操作使用 LIFO 策略发送这个事件, 这样状态机在处理这事件前不能够改变状态。
- 召回一个事件牵涉到把它发送给自己,然而,和提醒器模式不一样,延迟的事件是外部的而不是被创造出来的。
- 它需要
正交构件
- 目的
作为组件使用状态机。
- 问题
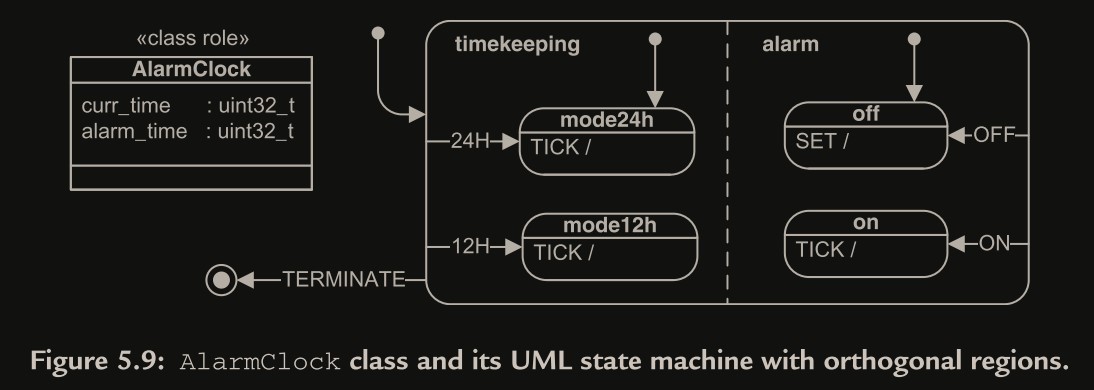
许多对象包含相对独立的具有状态行为的部分。例如,考虑一个简单的数字闹钟。这个设备执行 2 个大的独立的功能:基本的计时功能和闹钟功能。每个功能都有自己的操作模式。例如,计时可以使用 2 个模式: 12 小时制或 24 小时制。类似的,闹钟功能也可以启动或停止。
在 UML 状态图里建模这样行为的标准方法是吧每个这种松散关联的功能放到一个独立的正交区域。相当于两个线程,重用少,资源消耗大,且 QEP 不支持
- 解决方法
并发性实际上总是在聚合对象的内部出现,也就是说,组件的多个状态对这个合成对象的单一状态有贡献
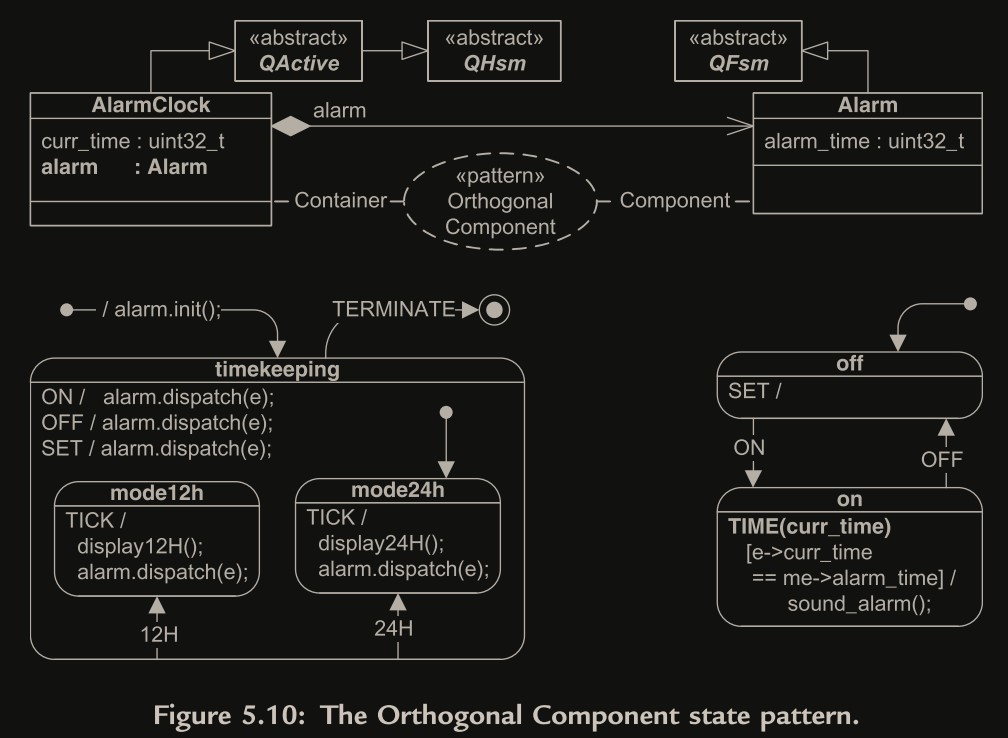
图中菱形加箭头就是 UML 中的聚合的表示
将两个功能拆成两个状态机,通过聚合方式进行关联,将闹钟功能状态机(组件)放在计时功能状态机(容器)内作为组件
- 代码样本
共有信号和事件 clock.h:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
#ifndef clock_h
#define clock_h
enum AlarmClockSignals
{
TICK_SIG = Q_USER_SIG, /* time tick event */
ALARM_SET_SIG, /* set the alarm */
ALARM_ON_SIG, /* turn the alarm on */
ALARM_OFF_SIG, /* turn the alarm off */
ALARM_SIG, /* alarm event from Alarm component to AlarmClock container */
CLOCK_12H_SIG, /* set the clock in 12H mode */
CLOCK_24H_SIG, /* set the clock in 24H mode */
TERMINATE_SIG /* terminate the application */
};
/*.................................................................*/
typedef struct SetEvtTag
{
QEvent super; /* derive from QEvent */
uint8_t digit;
} SetEvt;
// 用于通知当前时间的事件
typedef struct TimeEvtTag
{
QEvent super; /* derive from QEvent */
uint32_t current_time;
} TimeEvt;
// 只使用基类QActive指针,组件类不需要知道容器类的具体结构,该技术叫不透明指针(opaque pointer)
extern QActive *APP_alarmClock; /* AlarmClock container active object */
#endif /* clock_h */
Alarm 组件(闹钟功能)声明 alarm.h:
1
2
3
4
5
6
7
8
9
10
11
12
13
#ifndef alarm_h
#define alarm_h
typedef struct AlarmTag
{ /* the HSM version of the Alarm component */
// 闹钟功能比较简单,只要ON和OFF两种状态,不需要层次式状态机
// 用FSM有限状态机就行了
QFsm super; /* derive from QFsm */
uint32_t alarm_time;
} Alarm;
void Alarm_ctor(Alarm *me);
#define Alarm_init(me_) QFsm_init((QFsm *)(me_), (QEvent *)0)
#define Alarm_dispatch(me_, e_) QFsm_dispatch((QFsm *)(me_), e_)
#endif /* alarm_h */
Alarm 组件(闹钟功能)的定义 alarm.c:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
#include "alarm.h"
#include "clock.h"
/* FSM state-handler functions */
QState Alarm_initial(Alarm *me, QEvent const *e);
QState Alarm_off(Alarm *me, QEvent const *e);
QState Alarm_on(Alarm *me, QEvent const *e);
/*......................................................................*/
void Alarm_ctor(Alarm *me)
{
// 调用基类构造函数
QFsm_ctor(&me->super, (QStateHandler)&Alarm_initial);
}
/* HSM definition -------------------------------------------------------*/
QState Alarm_initial(Alarm *me, QEvent const *e)
{
(void)e; /* avoid compiler warning about unused parameter */
me->alarm_time = 12 * 60;
return Q_TRAN(&Alarm_off);
}
/*......................................................................*/
// 闹钟关状态
QState Alarm_off(Alarm *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
/* while in the off state, the alarm is kept in decimal format */
// 将时间内部二进制表示形式转为人类可读小时和分钟分离的十进制格式,如725转为1205,表示12:05
// 用于设置时间时为人类用户提供方便
me->alarm_time = (me->alarm_time / 60) * 100 + me->alarm_time % 60;
printf("*** Alarm OFF %02ld:%02ld\n",
me->alarm_time / 100, me->alarm_time % 100);
return Q_HANDLED();
}
case Q_EXIT_SIG:
{
/* upon exit, the alarm is converted to binary format */
// 退出前转换回去
me->alarm_time = (me->alarm_time / 100) * 60 + me->alarm_time % 100;
return Q_HANDLED();
}
case ALARM_ON_SIG:
{
return Q_TRAN(&Alarm_on);
}
// OFF状态允许设置闹钟
case ALARM_SET_SIG:
{
/* while setting, the alarm is kept in decimal format */
// 设置的的闹钟是人类可读的十进制格式
uint32_t alarm = (10 * me->alarm_time + ((SetEvt const *)e)->digit) % 10000;
// 合法性判断
if ((alarm / 100 < 24) && (alarm % 100 < 60))
{ /*alarm in range?*/
me->alarm_time = alarm;
}
else
{ /* alarm out of range -- start over */
me->alarm_time = 0;
}
printf("*** Alarm SET %02ld:%02ld\n",
me->alarm_time / 100, me->alarm_time % 100);
return Q_HANDLED();
}
}
return Q_IGNORED();
}
/*......................................................................*/
QState Alarm_on(Alarm *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("*** Alarm ON %02ld:%02ld\n",
me->alarm_time / 60, me->alarm_time % 60);
return Q_HANDLED();
}
// ON状态禁止设置闹钟
case ALARM_SET_SIG:
{
printf("*** Cannot set Alarm when it is ON\n");
return Q_HANDLED();
}
case ALARM_OFF_SIG:
{
return Q_TRAN(&Alarm_off);
}
// ON状态下处理由 AlarmClock 容器发送的TIME事件,获取当前时间进行比较
case TIME_SIG:
{
if (((TimeEvt *)e)->current_time == me->alarm_time)
{
printf("ALARM!!!\n");
/* asynchronously post the event to the container AO */
// 时间到达时发送事件给容器
QActive_postFIFO(APP_alarmClock, Q_NEW(QEvent, ALARM_SIG));
}
return Q_HANDLED();
}
}
return Q_IGNORED();
}
AlarmClock 容器(计时功能)定义 clock.c:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
#include "qp_port.h"
#include "bsp.h"
#include "alarm.h"
#include "clock.h"
/*.....................................................................*/
typedef struct AlarmClockTag
{ /* the AlarmClock active object */
QActive super; /* derive from QActive */
// 当前时间
uint32_t current_time; /* the current time in seconds */
// 定时事件
QTimeEvt timeEvt; /* time event generator (generates time ticks) */
// 包含了Alarm组件(闹钟功能)
Alarm alarm; /* Alarm orthogonal component */
} AlarmClock;
void AlarmClock_ctor(AlarmClock *me); /* default ctor */
/* hierarchical state machine ... */
QState AlarmClock_initial(AlarmClock *me, QEvent const *e);
QState AlarmClock_timekeeping(AlarmClock *me, QEvent const *e);
QState AlarmClock_mode12hr(AlarmClock *me, QEvent const *e);
QState AlarmClock_mode24hr(AlarmClock *me, QEvent const *e);
QState AlarmClock_final(AlarmClock *me, QEvent const *e);
/*.....................................................................*/
void AlarmClock_ctor(AlarmClock *me)
{ /* default ctor */
QActive_ctor(&me->super, (QStateHandler)&AlarmClock_initial);
Alarm_ctor(&me->alarm); /* orthogonal component ctor */
QTimeEvt_ctor(&me->timeEvt, TICK_SIG); /* private time event ctor */
}
/* HSM definition -------------------------------------------------------*/
QState AlarmClock_initial(AlarmClock *me, QEvent const *e)
{
(void)e; /* avoid compiler warning about unused parameter */
me->current_time = 0;
Alarm_init(&me->alarm); /* the initial transition in the component */
return Q_TRAN(&AlarmClock_timekeeping);
}
/*.....................................................................*/
QState AlarmClock_final(AlarmClock *me, QEvent const *e)
{
(void)me; /* avoid the compiler warning about unused parameter */
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("-> final\nBye!Bye!\n");
BSP_exit(); /* terminate the application */
return Q_HANDLED();
}
}
return Q_SUPER(&QHsm_top);
}
/*.....................................................................*/
QState AlarmClock_timekeeping(AlarmClock *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
/* periodic timeout every second */
QTimeEvt_fireEvery(&me->timeEvt,
(QActive *)me, BSP_TICKS_PER_SEC);
return Q_HANDLED();
}
case Q_EXIT_SIG:
{
QTimeEvt_disarm(&me->timeEvt);
return Q_HANDLED();
}
case Q_INIT_SIG:
{
return Q_TRAN(&AlarmClock_mode24hr);
}
case CLOCK_12H_SIG:
{
return Q_TRAN(&AlarmClock_mode12hr);
}
case CLOCK_24H_SIG:
{
return Q_TRAN(&AlarmClock_mode24hr);
}
case ALARM_SIG:
{
printf("Wake up!!!\n");
return Q_HANDLED();
}
case ALARM_SET_SIG:
case ALARM_ON_SIG:
case ALARM_OFF_SIG:
{
/* synchronously dispatch to the orthogonal component */
// 对于和组件相关的事件,通过组件提供的dispatch()函数转发给它
Alarm_dispatch(&me->alarm, e);
return Q_HANDLED();
}
case TERMINATE_SIG:
{
return Q_TRAN(&AlarmClock_final);
}
}
return Q_SUPER(&QHsm_top);
}
/*.....................................................................*/
QState AlarmClock_mode24hr(AlarmClock *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("*** 24-hour mode\n");
return Q_HANDLED();
}
case TICK_SIG:
{
TimeEvt pe; /* temporary synchronous event for the component */
if (++me->current_time == 24 * 60)
{ /* roll over in 24-hr mode? */
me->current_time = 0;
}
printf("%02ld:%02ld\n",
me->current_time / 60, me->current_time % 60);
((QEvent *)&pe)->sig = TICK_SIG;
pe.current_time = me->current_time;
/* synchronously dispatch to the orthogonal component */
// 每个tick都发送当前时间给组件
Alarm_dispatch(&me->alarm, (QEvent *)&pe);
return Q_HANDLED();
}
}
return Q_SUPER(&AlarmClock_timekeeping);
}
/*.....................................................................*/
QState AlarmClock_mode12hr(AlarmClock *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("*** 12-hour mode\n");
return Q_HANDLED();
}
case TICK_SIG:
{
TimeEvt pe; /* temporary synchronous event for the component */
uint32_t h; /* temporary variable to hold hour */
if (++me->current_time == 12 * 60)
{ /* roll over in 12-hr mode? */
me->current_time = 0;
}
h = me->current_time / 60;
printf("%02ld:%02ld %s\n", (h % 12) ? (h % 12) : 12,
me->current_time % 60, (h / 12) ? "PM" : "AM");
((QEvent *)&pe)->sig = TICK_SIG;
pe.current_time = me->current_time;
/* synchronously dispatch to the orthogonal component */
Alarm_dispatch(&me->alarm, (QEvent *)&pe);
return Q_HANDLED();
}
}
return Q_SUPER(&AlarmClock_timekeeping);
}
结论
- 它把行为的独立部分分区为不同的
状态机对象。这个分割比正交区域更深入,因为对象同时有明确的行为和明确的数据。 - 进行分区引进了
容器-组件(也叫父-子,或主-仆)关系。容器实现主要的功能并把其他 (次要的)特征授权给组件。容器和组件都是状态机。 组件常在不同的容器或相同的容器内被重用(容器可以实例化某个给定类型组件的多个组件)。- 容器同组件
共享它的执行线程。 - 容器通过直接
派送事件给组件来进行通讯。组件通过发送事件给容器来通知它,而不是通过直接地事件派送方法。 - 组件使用
提醒器模式去通知容器(例如,通知事件特别为内部而不是外部通讯被创造出来)。如果有某个给定类型的多个组件,这个通知事件必须确定起源的组件(组件把它的 ID 号作为通知事件的一个参数传递)。 - 容器和组件可以
共享数据。典型的,数据是容器(允许不同容器的多个实例)的一个数据成员。 典型的,容器担保对它所选择的组件是友元关系。 - 容器完全对它的组件
负责。特别的,它必须明确的触发在全部组件的初始转换。同时明确的派发事件给组件。如果容器“忘记”在它的某些状态派发事件给某些组件,就会产生错误。 - 容器可以
动态的开始和停止组件(例如,在容器状态机的的某些特定状态)。 - 状态机的结合并没有局限于只有一层。组件可以有状态机子组件,也就是说,组件可以是较低层子组件的容器。这样一种组件的
递归结构可以到达任意深的层次。
- 它把行为的独立部分分区为不同的
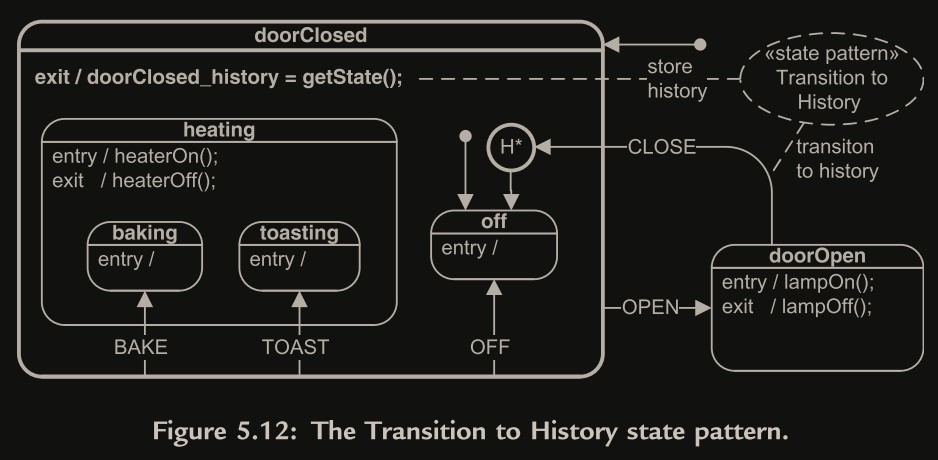
转换到历史状态
- 目的
从某个组合状态转换出来,但是记住最近的活动子状态,这样在后面你可以返回这个子状态。
- 问题
如让烤面包炉的门在工作中被打开后,再次关闭,能够恢复开门前的执行的动作。
UML 状态图使用 2 类历史伪状态处理这种情况:浅历史和深历史
- 解决方法
它把 doorClosed 状态最近的活动叶子状态存储在一个专用的数据成员 doorClosed_history 里。doorOpen 状态的转换到历史(带 圆圈的 H* )时使用这个属性作为这个转换的目标。
- 实例代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
#include "qep_port.h"
/*.....................................................................*/
enum ToasterOvenSignals
{
OPEN_SIG = Q_USER_SIG,
CLOSE_SIG,
TOAST_SIG,
BAKE_SIG,
OFF_SIG,
TERMINATE_SIG /* terminate the application */
};
/*.....................................................................*/
typedef struct ToasterOvenTag
{
QHsm super; /* derive from QHsm */
// 继承自QHsm,扩展了用于存放历史状态的doorClosed_history
QStateHandler doorClosed_history; /* history of the doorClosed state */
} ToasterOven;
void ToasterOven_ctor(ToasterOven *me); /* default ctor */
QState ToasterOven_initial(ToasterOven *me, QEvent const *e);
QState ToasterOven_doorOpen(ToasterOven *me, QEvent const *e);
QState ToasterOven_off(ToasterOven *me, QEvent const *e);
QState ToasterOven_heating(ToasterOven *me, QEvent const *e);
QState ToasterOven_toasting(ToasterOven *me, QEvent const *e);
QState ToasterOven_baking(ToasterOven *me, QEvent const *e);
QState ToasterOven_doorClosed(ToasterOven *me, QEvent const *e);
QState ToasterOven_final(ToasterOven *me, QEvent const *e);
/*.....................................................................*/
void ToasterOven_ctor(ToasterOven *me)
{ /* default ctor */
QHsm_ctor(&me->super, (QStateHandler)&ToasterOven_initial);
}
/* HSM definitio -------------------------------------------------------*/
QState ToasterOven_initial(ToasterOven *me, QEvent const *e)
{
(void)e; /* avoid compiler warning about unused parameter */
me->doorClosed_history = (QStateHandler)&ToasterOven_off;
return Q_TRAN(&ToasterOven_doorClosed);
}
/*.....................................................................*/
QState ToasterOven_final(ToasterOven *me, QEvent const *e)
{
(void)me; /* avoid compiler warning about unused parameter */
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("-> final\nBye!Bye!\n");
_exit(0);
return Q_HANDLED();
}
}
return Q_SUPER(&QHsm_top);
}
/*.....................................................................*/
QState ToasterOven_doorClosed(ToasterOven *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("door-Closed;");
return Q_HANDLED();
}
case Q_INIT_SIG:
{
return Q_TRAN(&ToasterOven_off);
}
case OPEN_SIG:
{
return Q_TRAN(&ToasterOven_doorOpen);
}
case TOAST_SIG:
{
return Q_TRAN(&ToasterOven_toasting);
}
case BAKE_SIG:
{
return Q_TRAN(&ToasterOven_baking);
}
case OFF_SIG:
{
return Q_TRAN(&ToasterOven_off);
}
case TERMINATE_SIG:
{
return Q_TRAN(&ToasterOven_final);
}
}
return Q_SUPER(&QHsm_top);
}
/*.....................................................................*/
QState ToasterOven_off(ToasterOven *me, QEvent const *e)
{
(void)me; /* avoid compiler warning about unused parameter */
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("toaster-Off;");
// 所有叶状态进入时都要更新一次doorClosed_history
me->doorClosed_history = (QStateHandler)&ToasterOven_off;
return Q_HANDLED();
}
}
return Q_SUPER(&ToasterOven_doorClosed);
}
/*.....................................................................*/
QState ToasterOven_heating(ToasterOven *me, QEvent const *e)
{
(void)me; /* avoid compiler warning about unused parameter */
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("heater-On;");
return Q_HANDLED();
}
case Q_EXIT_SIG:
{
printf("heater-Off;");
return Q_HANDLED();
}
}
return Q_SUPER(&ToasterOven_doorClosed);
}
/*.....................................................................*/
QState ToasterOven_toasting(ToasterOven *me, QEvent const *e)
{
(void)me; /* avoid compiler warning about unused parameter */
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("toasting;");
// 所有叶状态进入时都要更新一次doorClosed_history
me->doorClosed_history = (QStateHandler)&ToasterOven_toasting;
return Q_HANDLED();
}
}
return Q_SUPER(&ToasterOven_heating);
}
/*.....................................................................*/
QState ToasterOven_baking(ToasterOven *me, QEvent const *e)
{
(void)me; /* avoid compiler warning about unused parameter */
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("baking;");
// 所有叶状态进入时都要更新一次doorClosed_history
me->doorClosed_history = (QStateHandler)&ToasterOven_baking;
return Q_HANDLED();
}
}
return Q_SUPER(&ToasterOven_heating);
}
/*.......................................................................*/
QState ToasterOven_doorOpen(ToasterOven *me, QEvent const *e)
{
switch (e->sig)
{
case Q_ENTRY_SIG:
{
printf("door-Open,lamp-On;");
return Q_HANDLED();
}
case Q_EXIT_SIG:
{
printf("lamp-Off;");
return Q_HANDLED();
}
case CLOSE_SIG:
{
// 恢复历史状态
return Q_TRAN(me->doorClosed_history); /* transition to HISTORY */
}
}
return Q_SUPER(&QHsm_top);
}
结论
- 需要一个用于
存储历史状态的变量,这个变量是个指针,指向了状态处理函数 - 转换到历史伪状态(深历史和浅历史)使用标准的
Q_TRAN()宏编码,这里目标被特定为历史变量。 - 为了实现
深历史伪状态,需要在相应组合状态的每个叶子状态的进入动作上明确的设置历史变量。 - 为了实现
浅历史伪状态,需要在每一个从所需层次的退出动作上明确的设置历史变量。例如,图 5.12 中的 doorClosed 浅历史需要在从 toasting 的退出动作把 doorClosed_history 设置为 &ToasterOven_toasting,在从 baking 的退出动作把它设置为 &ToasterOven_baking ,以及 doorClosed 全部直接子状态。 - 你可以通过
复位相应的历史变量明确的清理任何组合状态的历史。
实时框架的概念
CPU 管理
传统的事件驱动型架构对实时框架不是非常适合。最起码在三个方面存在问题:
- 响应性:单一事件队列不允许对工作的任何合理的
优先次序。每个事件,无论优先级,必 须等待直到它前面的全部事件被处理完后才能被处理。 - 不支持对应用程序上下文的管理:流行的
事件 - 动作范型在响应事件时忽略应用程序的 上下文,这样应用程序员就即兴发挥,到最后搞出“面条”代码。不幸的是,事件 - 动作 范型和状态机不兼容。 - 全局数据:在传统的事件架构里,全部的事件处理函数存取一样的全局数据。这阻碍了对问 题的
分区,并为任何形式的多任务带来了并发性危机。
活动对象计算模式
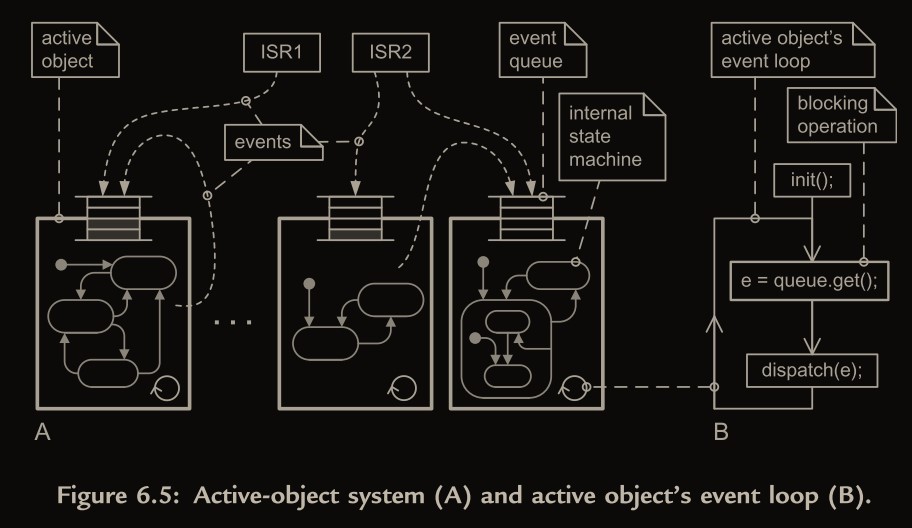
活动对象 = (控制的线程 + 事件队列 + 状态机)
应用程序包含了多个活动对象,每个都封装了一个控制线程(事件循环),一个私有的事件队列和一个状态机。
控制线程(事件循环): 图(a)中为一个环形标记(方框右下角),具体见图(b),事件循环调用和这个活动对象联合的 dispatch()函数。 dispatch()函数执行调度和处理事件的工作, 类似于在传统事件驱动型架构的事件处理函数。事件队列:(a)中的 event queue状态机:(a)中的 internal state machine
系统结构
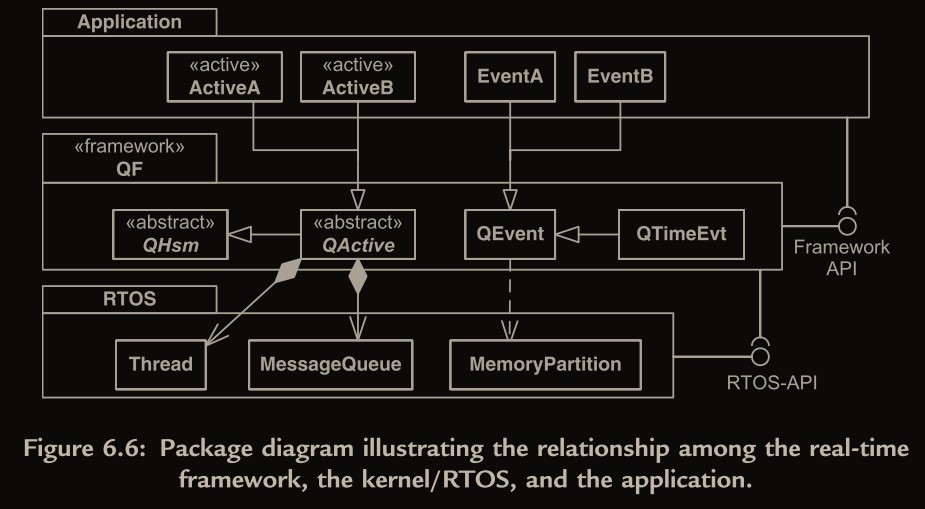
RTOS 层在底部提供多任务和基本服务,比如消息队列,为存储事件确定内存分区等等。基于这些服务, QF 实时框架提供 QActive 类用于活动对象的派生。 QActive 类是从 QHsm 基础类派生而来,这意味着活动对象是状态机,并且继承了在 QHsm 基础类(见第四章)定义的dispatch()操作。另外, QActive 包含了一个执行线程和一个事件队列,它基于底层 RTOS 上的消息队列。应用程序通过从 QActive 基础类派生活动对象以及从 QEvent 类派生带有参数的事件,从而扩展了实时框架。
异步通讯
活动对象专门的通过它们的事件队列接收事件。所以事件都被异步投递,意味着一个事件生产者仅发送一个事件给接收者活动对象的事件队列,但是不会原地等待这个事件的实际处理过程。
活动对象之间也可以通过这种方式传递事件,而不只局限于内部。
运行 - 到 - 完成 RTC
每一个活动对象用运行到完成( run-to-completion)方式来处理事件,它是通过活动对象的事件循环的结构来保证的。
封装
封装意味着活动对象不共享数据和任何其他资源。
数据通过消息机制传递
事件派发机制
两类事件派发机制:
简单的事件直接发送机制:一个事件的生产者直接发送这个事件到消费者活动对象的事件队列。订阅派发机制,这里一个生产者“发行”一个事件给框架,框架然后把这个事件派发给所有已经“订阅”了这个事件的活动对象。发行-订阅机制提供了在事件产生者和消费者之间较低的耦合。
直接事件发送
例如,QF 实时框架提供了操作 QActive_postFIFO()
这个事件传递的方式需要事件产生者密切的“知道”接收者。这种知识,散布在参与应用程序的组件中,使组件之间的耦合非常强烈和在运行时不灵活。
订阅派发机制
- 事件的产生者和消费者不需要互相了解对方(
松耦合)。 - 通过这个机制的事件交换必须被公开的了解,全部参与者必须有
相同的语义。 - 需要一个
介质去接收所发行的事件,再把它们派发给感兴趣的订阅者。 多对多交互作用(对象-到-对象)被一对多交互作用(对象-到-介质)所取代
事件内存管理
事件频繁产生消耗,内存重用很重要
零复制的事件派发
复制整个事件到消息队列的蛮力方法是一个传统的 RTOS 能做的最好方法,因为一个 RTOS 在事件离开队列后不能够控制它们。另一方面,一个实时框架可以更加有效,因为由于控制的倒置,框架实际在管理一个事件的全部生命周期。
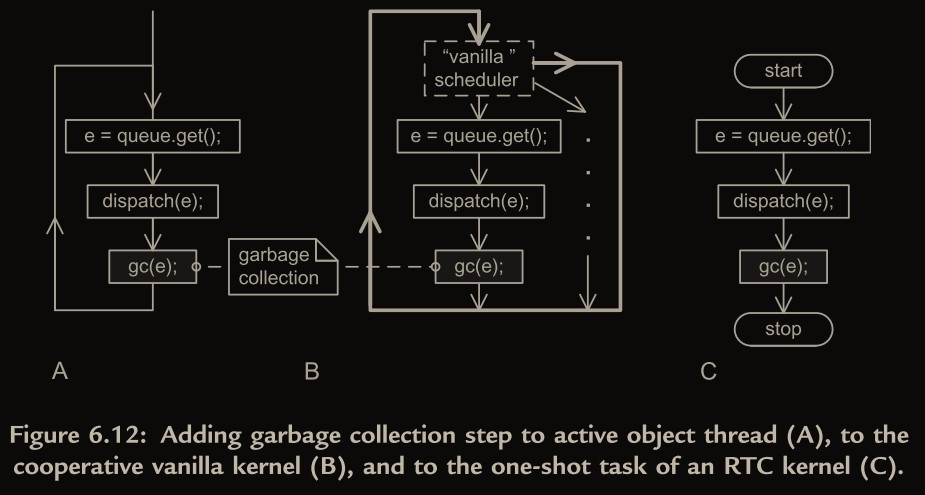
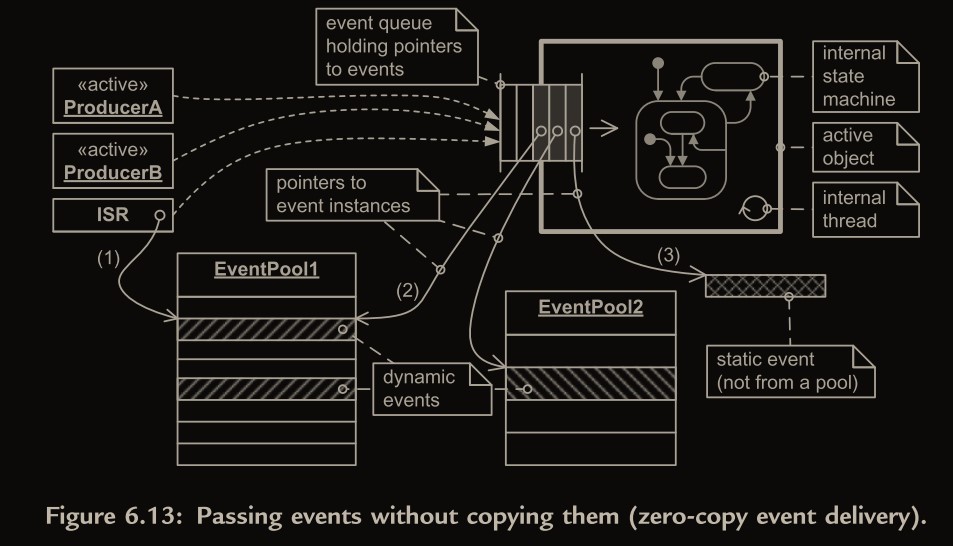
一个事件的生命周期开始于框架分配事件内存并返回一个指向这个内存的指针给事件生产者,如图(1),生产者然后填充事件参数,执行写入所提供的事件指针。然后,事件生产者发送这个事件指针给接收者活动对象的队列,如图(2)
稍后,活动对象开始处理事件。活动对象读取通过指针从队列里提取的事件数据。最后,框架在垃圾收集步骤自动的回收事件。请注意事件从来没有被复制。同时框架确信事件没有被过早回收。当然,框架必须也保证用一个线程安全的方式执行全部操作。
静态和动态的事件
- 静态事件:没有参数或参数不会变的事件,可以静态分配,永远不变,如上图(3)
- 动态事件:参数会变的事件,需要事件池动态分配
多路传输事件和引用计数器算法
使用订阅分发机制时也可以使用零复制派发事件指针。但该指针被多个活动对象使用,问题是如何知道最后一个活动对象完成了对这个给定事件的处理,这样它占用的空间可以被回收。
一个简便的方法是使用标准的引用计数器算法,每个动态事件有个计数器,开始为 0,每次发生事件加 1,每次被回收时减 1,到 0 删除事件内存
事件的所有权
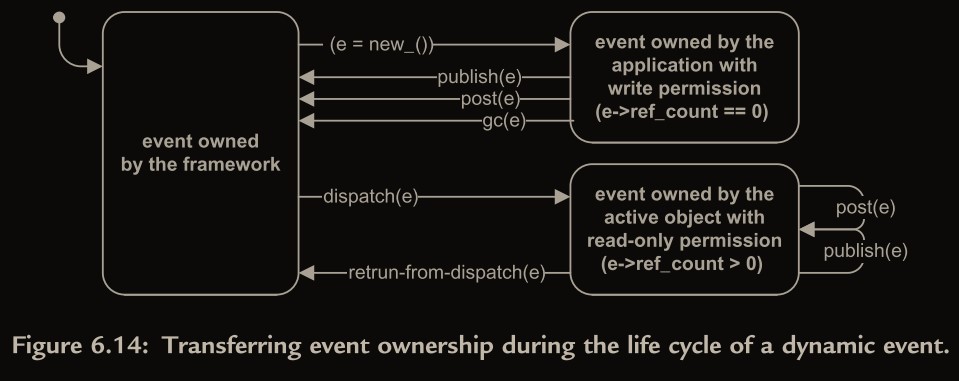
生产者仅能通过调用 new_() 操作来获得一个新事件的所有权。但是最后生产者必须把所有权转让给框架,如生产者发送或发行事件,主动要求删除不完整事件
消费者活动对象在框架调用 dispatch(e) 操作时获得当前事件 e 的所有权(只读)。当 dispatch()操作返回到框架时,所有权被终止。
内存池
堆一般有碎片化、泄露、悬空指针、难以预测、无法重入、空间浪费(管理信息)等问题
内存池会有一定优势,QF 实时框架,可以管理多达 3 个拥有不同块尺寸(小,中,大)的事件池。
时间管理
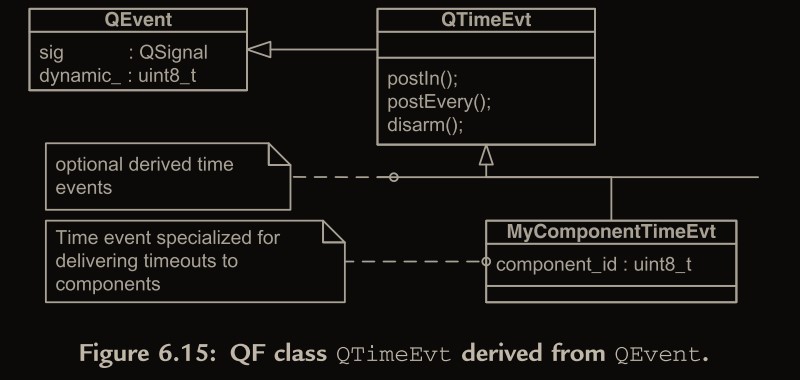
当活动对象需要安排一个超时服务,它准备它的某个时间事件以便在未来的某时刻发送给自己。
时间事件为这个目的提供的公共操作:为一次性超时提供postIn(),为周期性超时提供 postEvery() 。
应用程序可以明确的使用 disarm() 操作在任何时刻解除 (disarm) 任何(周期性的或一次性的)时间事件,之后该事件空间可以重用。
可以通过 rearm() 操作重新设定 (rearmed),如刷新看门狗
系统时钟节拍
系统时钟节拍典型地是一个以预先确定的速率发生的周期性中断,典型的速率在 10 和 100Hz 之间。
下图用某种夸张的方式展示了在一个节拍间隔内一个周期性时间事件的不同的延迟:
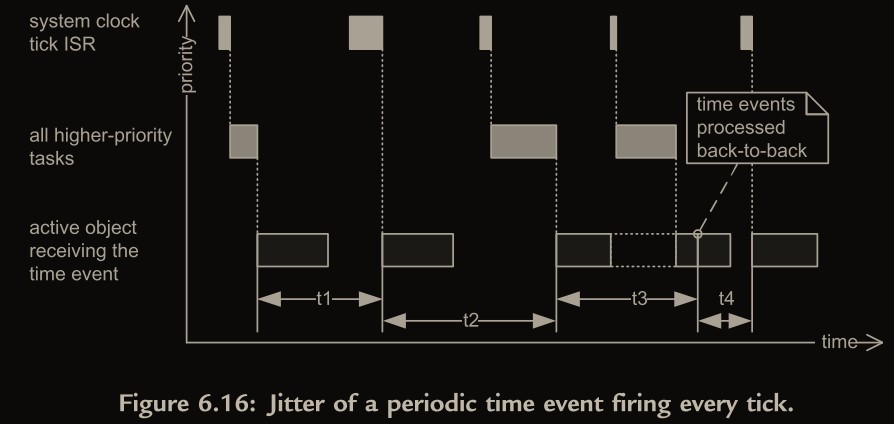
高优先级的任务能更及时获得节拍,且跳动(jitter)较少。
一个仅为了一个节拍而准备的时间事件会立刻过期,比如上图第 3 个节拍处理时已经在第 4 个节拍之后了,因为还在处理第 3 个节拍对应的的事件动作,可能会导致第 4 个节拍事件没有产生(类似中断丢失),导致第 4 个节拍对应的动作无法执行。解决方法是事件要对应两个节拍,也就是原来指定第 4 个节拍发生的动作应该指定为 4 和 5 都能发生。
错误和例外的处理
- 契约式设计 Design by Contract, DbC 方法
- 通过
断言assertion来保证程序正常,它们既不预防错误也实际上不处理错误- 更适合小型系统,正常状态不应该有错误,有错误就复位,不允许跑飞的程序继续运行
- 防御式编程
- 通过接收
更宽范围的输入或允许操作的次序不必定符合对象的状态,让操作对错误更加强壮。- 适合大型系统,尽可能规避错误,即使有错误也要尝试处理和恢复,不能退出进程或重启。因为大型系统运行有很高的不确定性,比如用户的输入无法预测。
QF 框架规定了一些断言宏来处理错误
C 和 C++ 里可定制的断言
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
#ifdef Q_NASSERT /* Q_NASSERT defined–assertion checking disabled */
// 如果Q_NASSERT被定义,取消所有的断言,宏全定义成空语句
#define Q_DEFINE_THIS_FILE
#define Q_DEFINE_THIS_MODULE(name_)
#define Q_ASSERT(test_) ((void)0)
#define Q_ALLEGE(test_) ((void)(test_))
#define Q_ERROR() ((void)0)
#else /* Q_NASSERT not defined–assertion checking enabled */
/* callback invoked in case the condition passed to assertion fails */
#ifdef __cplusplus
extern "C"
#endif
// 断言失败时Q_onAssert被调用,一般就是关中断做些保存然后复位
void Q_onAssert(char const Q_ROM *const Q_ROM_VAR file, int line);
// 本文件的文件名,别的文件include这个头文件后,会变成那个文件的名字,作为日志打印时的标识符
// 这里使用了static变量l_this_file作为宏定义而不是__FILE__,防止每次使用Q_DEFINE_THIS_FILE宏时__FILE__被多次复制
#define Q_DEFINE_THIS_FILE \
static char const Q_ROM Q_ROM_VAR l_this_file[] = __FILE__;
// Q_DEFINE_THIS_FILE替代品,需要自定义
#define Q_DEFINE_THIS_MODULE(name_) \
static char const Q_ROM Q_ROM_VAR l_this_file[] = #name_;
/* general purpose assertion */
// 避免悬吊if(dangling-if),详见上文
// test是一个条件,为true或是false
#define Q_ASSERT(test_) \
if (test_) \
{ \
} \
else \
(Q_onAssert(l_this_file, __LINE__))
/* general purpose assertion that ALWAYS evaluates the test_ argument */
#define Q_ALLEGE(test_) Q_ASSERT(test_)
/* Assertion that always fails */
#define Q_ERROR() \
(Q_onAssert(l_this_file, __LINE__))
#endif /* Q_NASSERT */
/* assertion that checks for a precondition */
#define Q_REQUIRE(test_) Q_ASSERT(test_)
/* assertion that checks for a postcondition */
#define Q_ENSURE(test_) Q_ASSERT(test_)
/* assertion that checks for an invariant */
#define Q_INVARIANT(test_) Q_ASSERT(test_)
/* compile-time assertion */
// 用于编译时的测试,利用C语言特性数组维数不能为0,如果test_为0,编译就会失败
// Q_ASSERT用于运行时测试断言,Q_ASSERT_COMPILE用于编译时测试断言,各有各的用途。比如运行时动态变化的变量要用Q_ASSERT,对于编译时确定的固定的量要用Q_ASSERT_COMPILE
#define Q_ASSERT_COMPILE(test_) \
extern char Q_assert_compile[(test_)]
#endif /* qassert_h */
基于框架的软件追踪
简单的讲,软件追踪类似于在代码里安排一些 printf()语句,它被称为检测代码,记录并分析以后从目标系统取回来的所感兴趣的分立事件。当然,一个好的软件追踪检测设备可以做到比简单的 printf()更少的侵入并更有效。
从框架自身得到的软件追踪数据,允许你为全部系统里的活动对象生成完整的,带有时间戳的顺序图和详细的状态机活动图。
使用 QS 构件(Q-Spy)实现
实时框架的实现
QF 框架的代码实现详解,对上一章的补充
QF 实时框架的关键特征
可移植性
所以 QF 源代码使用可移植的 ANSI-C ,或者
嵌入式 C++子集(wiki 上说这个项目从 2002 年开始就停止了,而且 C++之父也不看好)编写,所有处理器相关的,编译器相关的,或操作系统相关的代码被抽象成一个清楚定义的平台抽象层 PAL( platform abstraction layer)。可伸缩性
QF 被设计用于一个
细粒度的对象库的部署,你可以静态的把它链接到你的应用程序。这个策略把责任交给链接器,让它在链接时自动排除任何没用到的代码,应用程序员不需为每个应用程序在编译时刻去配置 QF 代码。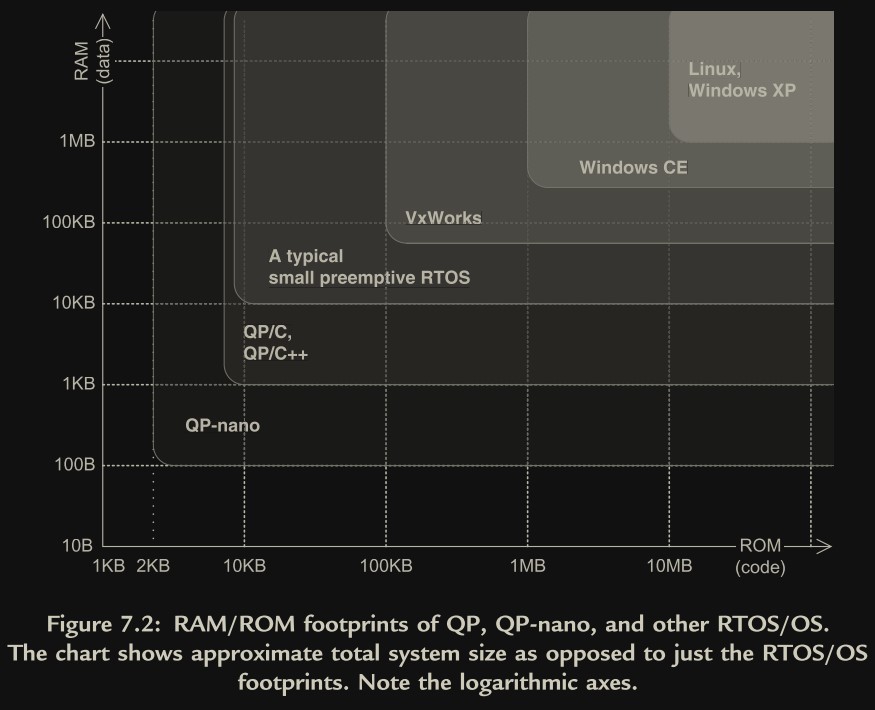
对现代状态机的支持
QF 实时框架被设计为和 QEP 层次式事件处理紧密的工作,QEP 提供了 UML 兼容的直接实现,而 QF 提了并发执行这类状态机的基础设施。
直接事件发送和发布 - 订阅式事件派发
QF 实时框架支持使用 FIFO 和 LIFO 策略对特点活动对象进行直接事件发送。QF 也支持更加先进的发行 - 订阅事件派发机制。
零复制的事件内存管理
QF 支持 事件的基于引用计数算法的多路发送,对事件的
自动垃圾收集,高效的静态事件,“零复制”事件延迟, 和可多多达 3 个为了最佳内存使用而拥有不同块尺寸的事件池。开放式序号的时间事件
每个时间事件可以被作为一个一次性或周期性超时发生器而被激活。只有被激活( active ) 的时间事件才消耗 CPU 周期。
原生的事件队列
QF 提供原生事件队列的 2 个版本。
第一个版本是为活动对象优化的,包含一个可移植的可以为
阻塞型内核、简单的合作式 vanilla 内核或QK 可抢占型内核而做修改的层。第二个版本是一个简单的“线程安全的”队列,它不能阻塞,被设计为给中断发送事件和存储延迟的事件。
原生的内存池
QF 提供了一个快的,可确定的,和线程安全的内存池。 QF 在内部把内存池作为管理动态事件的事件池,但是你也可以为了在你系统中分配任何其他对象而使用内存池。
内置 Vanilla 调度器
QF 实时框架包含了一个可移植的,合作式 vanilla 内核
和 QK 可抢占式内核的紧密集成
QF 实时框架也可以和可确定的,可抢占的,非阻塞 QK 内核工作。
低功耗构架
绝大多数嵌入式微处理器 MCU 提供了一个低功耗睡眠模式的选择,用来通过调节给 CPU 和其他外设的时钟来节省能量。睡眠模式通过软件控制进入,在某个外部中断时退出。
基于断言的错误处理
契约式设计( DbC)哲学
内置软件追踪测试设备
一个实时框架可以使用软件追踪技术提供比任何传统的 RTOS 更广泛和更详细的,关于运行中应用系统的信息。关闭 Q_SPY 宏时不产生空间和性能开销
QF 的结构
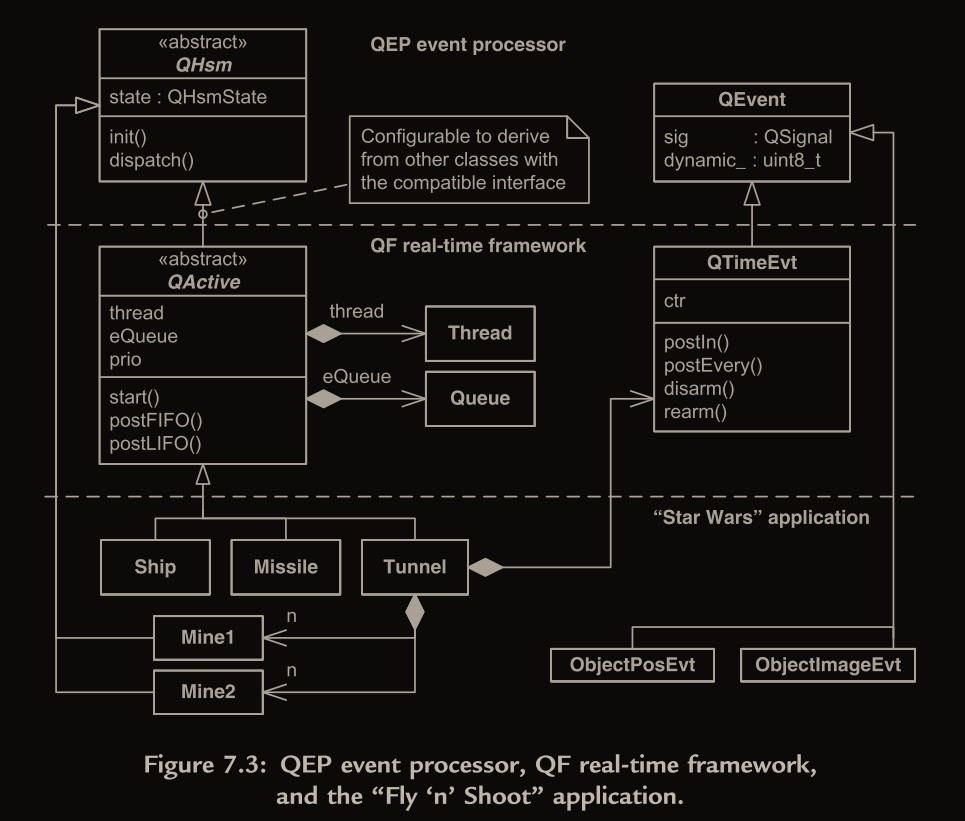
QF 提供了核心基本类 QActive ,用于活动对象类的派生。 QActive 类是抽象的,意味着它不是打算用于被直接实例化,而是为了派生具体的活动对象类,比如图内的Ship,Missile和 Tunnel 。
QActive 类默认是从在 QEP事件处理器的 QHsm 层次式状态机类派生。这意味着,凭借着继承,活动对象是 HSM,并继承了 init() 和 dispatch() 状态机接口。 QActive 也包含了一个执行线程和一个事件队列,它可以是原生的 QF 类,或者由底层 RTOS 提供。
和QEP事件处理器一样, QF 使用同样的 QEvent 类来表示事件。另外,框架提供了时间事件类 QTimeEvt,应用程序使用它来产生超时请求。
QF 也提供了几个服务给应用程序,它们没有在图的类图展示出来。这些额外的 QF 服务包括生成新的动态事件 (Q_NEW()) ,发行事件( QF_publish()),原生 QF 事件队列类 (QEQueue) ,原生 QF 内存池类( QMPool ),和内建的合作式 vanilla 内核
QF 源代码的组织
QF 源代码文件典型地每个文件只包含一个函数或一个数据结构的定义。这个设计是为了把 QF 当作一个细粒度的库来部署,你可以静态的把它和你的应用程序链接。
这个策略把负担交给链接器,让它去在链接时排除任何没用的代码,而不是让程序员为每个应用程序在编译时配置 QF 代码。
TODO:新版本还是这样的吗,感觉整合了不少
QF 里的临界区
QF 和其他任何系统层软件一样,必须保护某些指令的顺序不被破坏从而担保线程安全的操作。这个必须被不可分割地执行的代码区被称为临界区。
嵌入式系统可以在进入临界区时关中断,在从临界区退出时解锁中断。
在不允许锁中断的系统里, QF 可以采用其他的由底层操作系统支持的机制,比如互斥体( mutex )
QF 平台抽象层包含 了 2 个宏 QF_INT_LOCK()和 QF_INT_UNLOCK() ,分别用来进入临界区和退出临界区。
有两种方式来实现临界区:无条件锁住和解锁中断和保存和恢复中断状态
无条件上锁和解锁中断
简单粗暴的做法,直接关闭中断(直接调用int_lock())来进入临界区:
1
2
3
/* QF_INT_LOCK_KEY not defined */
#define QF_INT_LOCK(key_) int_lock()
#define QF_INT_UNLOCK(key_) int_unlock()
“无条件上锁和解锁”策略是简单和快捷的,但缺点是不允许临界区的嵌套,因为调用了int_lock()后在int_unlock()前无法再次调用int_lock(),这会造成阻塞(类似死锁)。
必须配套使用一个基于优先级的中断控制器,相比于不基于优先级的中断控制器,它可以在 ISR 中仅开启更高优先级的中断的嵌套而不是所有的中断。这个特性为在 ISR 中调用内部拥有临界区的 QF 函数提供可能。(如果开启所有中断,特别是同一个中断,相同的 ISR 就会重复执行,一般这是不允许的,也就是不能在 ISR 中开启所有中断,而开启更高优先级的中断是允许的)
除了在 ISR 中暂时关闭临界区外还有一种方法就是让 QF 相关函数在 ISR 内执行时不去使用锁(因为 ISR 本身就在临界区),这就需要函数能判断当前的中断状态,这就是下一节中的保存和恢复中断状态
使用一个基于优先级的中断控制器时一个 ISR 的常规结构:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
// 这是个ISR中断处理程序
// 绝大多数控制器在进入 ISR 时,中断被硬件上锁。中断控制器被关闭,所有中断被关闭,不论优先级
// 不能嵌套临界区并不意味着你不能嵌套中断。许多处理器拥有基于优先级的中断控制器
void interrupt ISR(void) { /* entered with interrupts locked in hardware */
// 中断控制器必须被通知要进入这个中断。这个通知常在定向(跳转)到 ISR 之前自动在硬件层发生。
Acknowledge the interrupt to the interrupt controller (optional)
// 如果中断源是电平触发的,你需要明确的清除它,以便触发下一次该中断。
// 因为这里同优先级的中断也被关闭了,本来就不能触发,所以之后清除也没关系
Clear the interrupt source, if level triggered
// 如果之前被关中断了就执行开中断,使能中断控制器,由于基于优先级的中断控制器存在,
// 这样高优先级的中断可以执行,更低或相同优先级的中断依旧不能执行。此时ISR内临界区结束
QF_INT_UNLOCK(dummy); /* unlock the interrupts at the processor level */
// 主 ISR 代码在临界区外执行,因此 QF 可以被安全的调用而不需嵌套临界区。
Handle the interrupt, use QF calls, e.g., QF_tick(), Q_NEW or QF_publish()
// 中断被锁住,为中断的离开建立临界区。
QF_INT_LOCK(dummy); /* lock the interrupts at the processor level */
// EOI (end of interrupt) 指令被发往中断控制器,停止这个中断的优先权
Write End-Of-Interrupt (EOI) instruction to the Interrupt Controller
// 由编译器提供的中断退出步骤,从堆栈恢复 CPU寄存器,包括 CPU状态寄存器。典型地这个步骤会解锁中断。
}
基于优先级的中断控制器记忆当前所服务的中断的优先级,并仅允许比当前优先级高的中断抢占这个 ISR 。较低的或相同优先级的中断在中断控制器层次被锁住,即使这些中断在处理器层次被解锁。中断优先排序发生在中断控制器硬件层,直到中断控制器接受到中断结束 EOI 指令为止。所以说这个“无条件上锁和解锁中断”策略需要基于优先级的中断控制器的支持,这样即使在 ISR 内部开中断,也不会导致低优先级中断插进来影响 ISR 主体的执行
问: 上例中 ISR 内使用
QF_INT_UNLOCK(dummy);开中断是为了什么?解答:QF 函数执行部分
内部有些也使用的关开中断创建临界区的部分,为了防止再次调用QF_INT_LOCK()导致的阻塞,需要关闭。
保存和恢复中断状态
相比于无条件上锁和解锁中断,保存和恢复中断状态增加了中断状态的保存和判断,使其使用时更加灵活,无需考虑是否会发生死锁。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
{
unsigned int lock_key;
. . .
// 关中断前保存当前中断状态,用于后面恢复
lock_key = get_int_status();
// 关闭中断,功能由编译器提供
int_lock();
. . .
/* critical section of code */
. . .
// 恢复中断状态,相当于开中断
set_int_status(lock_key);
. . .
}
用于实现这个功能的宏定义:
1
2
3
4
5
6
7
8
9
10
// 这个宏用于在预编译时告诉QF框架是否使用“保存和恢复中断状态”策略(该宏定义时生效),
// 还是下一节的“无条件锁住和解锁中断”策略(该宏不定义时生效)
#define QF_INT_KEY_TYPE unsigned int
#define QF_INT_LOCK(key_) \
do \
{ \
(key_) = get_int_status(); \
int_lock(); \
} while (0)
#define QF_INT_UNLOCK(key_) set_int_status(key_)
QF_INT_LOCK()宏的 do {…} while (0) 循环是语法正确的用来
组合指令的标准做法。这个宏可以被安全的用于if-else语句(在宏后加分号),而不会造成“悬吊 if”( dangling-if )问题。
“保存和恢复中断状态”政策的主要优点是可以嵌套临界区的能力。当 QF 函数从一个已经建立的临界段比如 ISR 里调用时,且部分处理器在进入 ISR 后自动关中断(进临界区),需要在 ISR 内部先解锁中断才能使用 QF 函数(详见上节例子),如果做不到就需要使用上述的办法嵌套临界区。
中断上锁/解锁的内部 QF 宏
QF 平台抽象层 (platform abstraction layer)PAL 使用中断上锁/解锁宏QF_INT_LOCK(), QF_INT_UNLOCK() ,和 QF_INT_KEY_TYPE 。
中断上锁 / 解锁的内部宏:
1
2
3
4
5
6
7
8
9
#ifndef QF_INT_KEY_TYPE /* simple unconditional interrupt locking/unlocking */
#define QF_INT_LOCK_KEY_
#define QF_INT_LOCK_() QF_INT_LOCK(ignore)
#define QF_INT_UNLOCK_() QF_INT_UNLOCK(ignore)
#else /* policy of saving and restoring interrupt status */
#define QF_INT_LOCK_KEY_ QF_INT_KEY_TYPE intLockKey_;
#define QF_INT_LOCK_() QF_INT_LOCK(intLockKey_)
#define QF_INT_UNLOCK_() QF_INT_UNLOCK(intLockKey_)
#endif
末尾带下划线的宏保持使用两种不同策略时的一致性(自动选择)
示例:
1
2
3
4
5
6
7
8
9
10
void QF_service_xyz(arguments)
{
QF_INT_LOCK_KEY_
...
QF_INT_LOCK_();
...
/* critical section of code */
...
QF_INT_UNLOCK_();
}
主动对象
QF 实时框架提供了基础结构 QActive 用于派生应用程序的特定好的对象。 QActive 结合了后面三个基本要素:
- 它是一个
状态机(从 QHsm 或其他拥有兼容接口的类派生) - 它是一个
事件队列 - 它有一个带有唯一优先级的
执行线程
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
// 可以自定义基础类,只要实现了状态机接口,也就是可以不用QEP框架里的QHsm
#ifndef QF_ACTIVE_SUPER_
// 基础类默认为QEP提供的QHsm类
#define QF_ACTIVE_SUPER_ QHsm
// 基础类构造函数名字
#define QF_ACTIVE_CTOR_(me_, initial_) QHsm_ctor((me_), (initial_))
// 基础类init初始化函数的名字
#define QF_ACTIVE_INIT_(me_, e_) QHsm_init((me_), (e_))
// 基础类dispatch()函数的名字
#define QF_ACTIVE_DISPATCH_(me_, e_) QHsm_dispatch((me_), (e_))
// 基础类构造函数的参数的类型
#define QF_ACTIVE_STATE_ QState
#endif
typedef struct QActiveTag
{
/// QActive 的基础类(继承)
QF_ACTIVE_SUPER_ super; /* derives from QF_ACTIVE_SUPER_ */
// 事件队列,可自定义
QF_EQUEUE_TYPE eQueue; /* event queue of active object */
// TODO:这个osObject在 #[POSIX的 QF 移植] 中会提到
#ifdef QF_OS_OBJECT_TYPE
QF_OS_OBJECT_TYPE osObject; /* OS-object for blocking the queue */
#endif
// 线程处理
#ifdef QF_THREAD_TYPE
QF_THREAD_TYPE thread; /* execution thread of the active object */
#endif
// 每个主动对象有唯一的优先级,最大为63,0是特殊的休眠优先级,也就是最大支持63个主动对象
uint8_t prio; /* QF priority of the active object */
// 用于一些移植,写入0会终止活动对象
uint8_t running; /* flag indicating if the AO is running */
} QActive;
// 开始执行
void QActive_start(QActive *me, uint8_t prio,
QEvent const *qSto[], uint32_t qLen,
void *stkSto, uint32_t stkSize,
QEvent const *ie);
// FIFO方式发送到活动对象的事件队列
void QActive_postFIFO(QActive *me, QEvent const *e);
// LIFO方式发送到活动对象的事件队列
void QActive_postLIFO(QActive *me, QEvent const *e);
// 构造函数
void QActive_ctor(QActive *me, QState initial);
// 停止活动对象执行线程
void QActive_stop(QActive *me);
// 和事件订阅相关
void QActive_subscribe(QActive const *me, QSignal sig);
void QActive_unsubscribe(QActive const *me, QSignal sig);
void QActive_unsubscribeAll(QActive const *me);
// 用于高效的(“零复制”)事件延迟和事件恢复
void QActive_defer(QActive *me, QEQueue *eq, QEvent const *e);
QEvent const *QActive_recall(QActive *me, QEQueue *eq);
// 从活动对象的事件队列每次移除一个事件,这个函数仅被用在 QF 内部,并且从不用于应用程序层
QEvent const *QActive_get_(QActive *me);
通过把宏 QF_ACTIVE_XXX_ 定义到你自己的类,你可以排除在 QF 框架和 QEP 事件处理器之间的依赖性。
自定义示例:
1
2
3
4
5
#define QF_ACTIVE_SUPER_ MyClass
#define QF_ACTIVE_CTOR_(me_, ini_) MyClass_ctor((me_), (ini_))
#define QF_ACTIVE_INIT_(me_, e_) MyClass_init((me_), (e_))
#define QF_ACTIVE_DISPATCH_(me_, e_) MyClass_dispatch((me_), (e_))
#define QF_ACTIVE_STATE_ void*
活动对象的内部状态机
每个活动对象都是一个状态机,如飞行和射击”游戏例子里的 Ship,Missile,或 Tunnel
活动对象由 QHsm 派生,利用多态特性可以使用QHsm指针使用派生活动对象的状态机函数(QEP 层),所以无论活动对象添加了多少自定义的变量,都可以当作状态机使用。
活动对象的事件队列
QF 的事件队列需要“多写单读”的存取权限,可以从其他地方(不同线程)发送事件到活动对象,活动对象线程每次取一个使用。所以需要读写互斥锁和写者互斥锁
“零复制“事件队列不存储实际事件,仅存储执行事件实例的指针。
可以使用操作系统提供的消息队列,尽管有点大材小用
执行线程和活动对象优先级
活动对象线程的步骤:
1
2
3
4
5
6
// 从事件队列获取事件,没事件时可以阻塞让线程休眠。
QEvent const *e = QActive_get_(a); /* get the next event for AO 'a' */
// 利用多态使用基类函数和基类指针作为参数执行派生后的函数实现
QF_ACTIVE_DISPATCH_(&a->super, e) /* dispatch to the AO 'a' */
// QF垃圾回收器回收无用的事件
QF_gc(e); /* determine if event 'e' is garbage and collect it if so */
QF 应用程序需要代表系统里的每个活动对象调用QActive_start()函数(启动活动对象)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
void QActive_start(QActive *me,
uint8_t prio, /* 唯一优先级,the unique priority */
QEvent const *qSto[], uint32_t qLen, /* 事件队列空间,event queue */
void *stkSto, uint32_t stkSize, /* 栈空间,per-task stack */
QEvent const *ie) /* 初始事件,the initialization event */
{
me->prio = prio; /* set the QF priority */
// 注册到QF
QF_add(me); /* make QF aware of this active object */
// 执行在活动对象里的状态机的最顶初始转换,参数 ie是一个指针,指向在活动对象状态机里用于最顶初始转换的初始事件。
QF_ACTIVE_INIT_(me, ie); /* execute the initial transition */
// 初始化事件队列
Initialize the event queue object 'me->eQueue' using qSto and qLen
// 创建活动对象线程
Create and start the thread 'me->thread' of the underlying kernel
}
“
初始事件” ie 让你有机会提供一些信息给活动对象,这个活动对象(这里原文用的which,是指代上一句的一些信息还是活动对象?)在后面的初始化过程才被知道(比如,在 GUI 系统里的一个窗口处理句柄)。请注意,(在 C++里)活动对象的构造函数在 main() 之前运行,这时你没有所有的信息来初始化一个活动对象的全部方面。
QF 的事件管理
“零复制”事件派发方案
- 被框架管理的
动态事件 - 其他不被 QF 管理的(
静态分配的)事件
事件的结构
1
2
3
4
5
typedef struct QEventTag { /* QEvent base structure */
QSignal sig; /* public signal of the event instance */
// 动态还是静态事件
uint8_t dynamic_; /* attributes of a dynamic event (0 for static event) */
} QEvent;
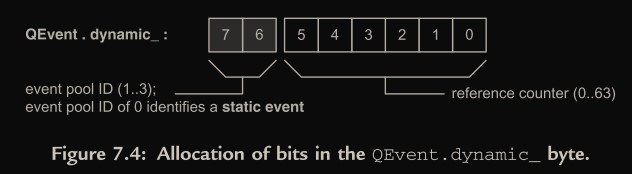
7,6 表示事件池 id(大、中、小、静态 0),5-0 表示事件引用计数器,引用计数器归 0 才回收
动态事件分配
大中小三个事件池,事件用完空间可回收
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
/* Package-scope objects ---------------------------------------------------*/
// 事件池管理信息,不包含实际空间
QF_EPOOL_TYPE_ QF_pool_[3]; /* allocate 3 event pools */
// 实际使用的池的数量
uint8_t QF_maxPool_; /* number of initialized event pools */
/*..........................................................................*/
// poolSto参数才是分配的实际事件空间
void QF_poolInit(void *poolSto, uint32_t poolSize, QEventSize evtSize)
{
/* cannot exceed the number of available memory pools */
// 合法性检查
Q_REQUIRE(QF_maxPool_ < (uint8_t)Q_DIM(QF_pool_));
/* please initialize event pools in ascending order of evtSize: */
Q_REQUIRE((QF_maxPool_ == (uint8_t)0) ||
(QF_EPOOL_EVENT_SIZE_(QF_pool_[QF_maxPool_ - 1]) < evtSize));
/* perfom the platform-dependent initialization of the pool */
// 所有框架操作需要的内存由应用程序提供给框架。这里实际分配空间为poolSto指向的内存
// 这个宏默认提供QMPool_init(就是QF原生内存池)的分配功能
QF_EPOOL_INIT_(QF_pool_[QF_maxPool_], poolSto, poolSize, evtSize);
// 变量 QF_maxPool_ 被增加,表示多个池已被初始化
++QF_maxPool_; /* one more pool */
}
所有 QP 构件,包括 QF 框架,一致地假设,在
系统开始时,所有初始值未明确的变量被初始化为 0,这是 ANSI-C 标准的要求。在嵌入式系统,这个初始化步骤对应于清除.BSS段(用来放全局变量)。你应该确信在你的系统里,在 main() 被调用前 .BSS 段确实被清除了。
从最小事件尺寸池分配一个事件的简单策略:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
QEvent *QF_new_(QEventSize evtSize, QSignal sig)
{
QEvent *e;
/* find the pool id that fits the requested event size ... */
uint8_t idx = (uint8_t)0;
// 从小到大找到合适的池
while (evtSize > QF_EPOOL_EVENT_SIZE_(QF_pool_[idx]))
{
++idx;
Q_ASSERT(idx < QF_maxPool_); /* cannot run out of registered pools */
}
// 从池中获取e(分配空间)
QF_EPOOL_GET_(QF_pool_[idx], e); /* get e -- platform-dependent */
// 断言池未枯竭
Q_ASSERT(e != (QEvent *)0); /* pool must not run out of events */
// 设置信号
e->sig = sig; /* set signal for this event */
/* store the dynamic attributes of the event:
* the pool ID and the reference counter == 0
*/
// 设置池标记(高两位)
e->dynamic_ = (uint8_t)((idx + 1) << 6);
return e;
}
自动垃圾收集
动态事件的引用计数器被存储在事件属性 dynamic_的低 6 位 LSB 里,发送事件时递增,归 0 由 QF 自动检测回收
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
void QF_gc(QEvent const *e)
{
// 判断是否动态事件
if (e->dynamic_ != (uint8_t)0)
{ /* is it a dynamic event? */
QF_INT_LOCK_KEY_
// 中断上锁,操作引用计数器需要临界区
QF_INT_LOCK_();
if ((e->dynamic_ & 0x3F) > 1)
{ /* isn't this the last reference? */
// 大于1,递减
--((QEvent *)e)->dynamic_; /* decrement the reference counter */
QF_INT_UNLOCK_();
}
else
{ /* this is the last reference to this event, recycle it */
// 小于1,回收,先从高2位获取index索引,找到对应池,然后归还空间
uint8_t idx = (uint8_t)((e->dynamic_ >> 6) - 1);
QF_INT_UNLOCK_();
Q_ASSERT(idx < QF_maxPool_); /* index must be in range */
QF_EPOOL_PUT_(QF_pool_[idx], (QEvent *)e);
}
}
}
延迟和恢复事件
QF 分别通过 QActive 的类函数 QActive_defer() 和 QActive_recall() 实现明确的事件延迟和恢复。见延迟的事件
当事件在某个特别不方便的时刻到达时,可以被延迟一些时间直到系统有一个比较好的状态去处理这个事件,事件的延迟是很方便的
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
void QActive_defer(QActive *me, QEQueue *eq, QEvent const *e)
{
(void)me; /* avoid compiler warning about 'me' not used */
// 发送给等待队列,这里计数器会被加1,防止被回收
// 因为事件被处理后即使不执行操作放入等待队列,计数器也会被减1
QEQueue_postFIFO(eq, e); /* increments ref-count of a dynamic event */
}
/*..........................................................................*/
QEvent const *QActive_recall(QActive *me, QEQueue *eq)
{
// 从等待队列取一个事件
QEvent const *e = QEQueue_get(eq); /* get an event from deferred queue */
if (e != (QEvent *)0)
{ /* event available? */
QF_INT_LOCK_KEY_
// 发送到事件队列,用LIFO插队到第一个,引用计数器会被加1
QActive_postLIFO(me, e); /* post it to the front of the AO's queue */
QF_INT_LOCK_();
if (e->dynamic_ != (uint8_t)0)
{ /* is it a dynamic event? */
Q_ASSERT((e->dynamic_ & 0x3F) > 1);
// 从等待队列里拿出来了,引用计数器要减1(事件队列里的处理后会自动减)
--((QEvent *)e)->dynamic_; /* decrement the reference counter */
}
QF_INT_UNLOCK_();
}
return e; /*pass the recalled event to the caller (NULL if not recalled) */
}
QF 的事件派发机制
QF 仅支持异步事件交换,发送者不等待事件处理
派发机制:
- 直接事件发送的简单机制 – 一个事件的生产者直接发送这个事件给消费者活动对象的事件队列。
- 订阅事件发送机制 – 事件的生产者把事件发行给框架,框架然后把事件发行给所有订阅了这个事件的活动对象。
直接事件发送
QF 通过 QActive_postFIFO() 和 QActive_postLIFO() 函数支持直接事件发送
1
QActive_postFIFO(AO_ship, (QEvent *)e); /* post event 'e' to the Ship AO */
这里参数 AO_ship 是 QActive 基类类型,利用了多态
1
extern QActive * const AO_Ship; /* opaque pointer to the Ship AO */
发行-订阅事件发送
- 初始化
发行-订阅机制: QF_psInit() - 订阅:QActive_subscribe(), QActive_unsubscribe(), QActive_unsubscribeAll()
- 发行:QF_publish()
管理订阅信息的数据结构:
1
2
3
4
5
typedef struct QSubscrListTag {
// QF_MAX_ACTIVE - 1表示需要的位数
// 除以8向上取整,表示需要的字节数
uint8_t bits[((QF_MAX_ACTIVE - 1) / 8) + 1];
} QSubscrList;
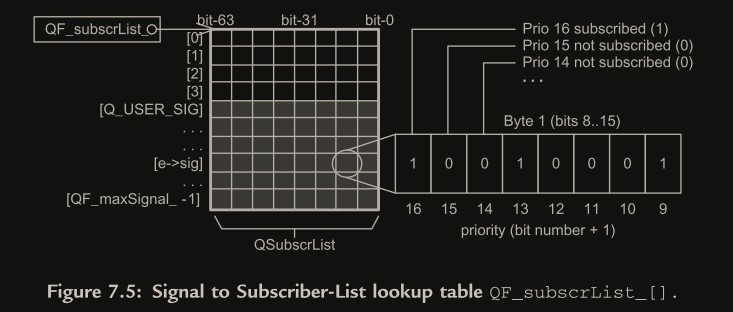
每类信号为一行,每行中的每一位对应一个主动对象,因为优先级和主动对象一一对应,所以通过优先级(1-63)对应位唯一标识,置位表示该事件被对应的主动对象订阅。如图中 bit15 对应优先级 16 的主动对象。
上图例子中每行 bit 为 64 个(目前 QF_MAX_ACTIVE 的范围是 1 到 63),这也是主动对象提到的优先级上限为 63 的原因
初始化
1 2 3 4 5 6 7 8
QSubscrList *QF_subscrList_; /* initialized to zero per C-standard */ QSignal QF_maxSignal_; /* initialized to zero per C-standard */ void QF_psInit(QSubscrList *subscrSto, QSignal maxSignal) { QF_subscrList_ = subscrSto; QF_maxSignal_ = maxSignal; }
订阅
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
// me: 本对象,sig:要订阅的信号 void QActive_subscribe(QActive const *me, QSignal sig) { uint8_t p = me->prio; // 字节索引,QF_div8Lkup[p] = (p – 1)/8, // 可以每次算也可以用预生成在ROM的查找表 uint8_t i = Q_ROM_BYTE(QF_div8Lkup[p]); QF_INT_LOCK_KEY_ Q_REQUIRE(((QSignal)Q_USER_SIG <= sig) && (sig < QF_maxSignal_) && ((uint8_t)0 < p) && (p <= (uint8_t)QF_MAX_ACTIVE) && (QF_active_[p] == me)); QF_INT_LOCK_(); // 找到字节内偏移,QF_pwr2Lkup[p] = 1 << ((p – 1) % 8), // 可以每次算也可以用预生成在ROM的查找表 QF_subscrList_[sig].bits[i] |= Q_ROM_BYTE(QF_pwr2Lkup[p]); QF_INT_UNLOCK_(); }
发行
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64
// 给所有订阅者发行一个给定事件 e void QF_publish(QEvent const *e) { QF_INT_LOCK_KEY_ /* make sure that the published signal is within the configured range */ Q_REQUIRE(e->sig < QF_maxSignal_); // 读取加修改,典型的临界区 QF_INT_LOCK_(); if (e->dynamic_ != (uint8_t)0) { /* is it a dynamic event? */ // e->dynamic_为0说明是高2位也是0,就是静态事件 /*lint -e1773 Attempt to cast away const */ // 增加一次引用计数器,防止刚发送给一个活动对象事件立刻被处理了的情况下, // 引用计数器直接归0,事件被回收,无法给其他活动对象发事件 // QF_publish执行到最后给所有订阅的活动对象发完,应该要减1 ++((QEvent *)e)->dynamic_; /* increment reference counter, NOTE01 */ } QF_INT_UNLOCK_(); #if (QF_MAX_ACTIVE <= 8) { // 只有一个字节 // 赋给临时变量,后面能随便修改 uint8_t tmp = QF_subscrList_[e->sig].bits[0]; while (tmp != (uint8_t)0) { // 不为0表示有订阅 // 找最高优先级的活动对象,也就是从高到低第一个为1的位, // 以 2 为底的对数查找快捷的确定在bitmask的MSB位 uint8_t p = Q_ROM_BYTE(QF_log2Lkup[tmp]); // 清掉该位 tmp &= Q_ROM_BYTE(QF_invPwr2Lkup[p]); /* clear subscriber bit */ Q_ASSERT(QF_active_[p] != (QActive *)0); /* must be registered */ /* internally asserts if the queue overflows */ // 向对应活动对象发送 QActive_postFIFO(QF_active_[p], e); } } #else { // Q_DIM获取字节数sizeof(array_) / sizeof((array_)[0U] uint8_t i = Q_DIM(QF_subscrList_[0].bits); do { /* go through all bytes in the subscription list */ // 遍历该事件信号对应的订阅清单里的所有字节 uint8_t tmp; // 从高到低遍历 --i; // 这里开始和上面单字节的一样了 tmp = QF_subscrList_[e->sig].bits[i]; while (tmp != (uint8_t)0) { uint8_t p = Q_ROM_BYTE(QF_log2Lkup[tmp]); tmp &= Q_ROM_BYTE(QF_invPwr2Lkup[p]); /*clear subscriber bit */ // 这里和上面不一样,要移位一下 p = (uint8_t)(p + (i << 3)); /* adjust the priority */ Q_ASSERT(QF_active_[p] != (QActive *)0); /*must be registered*/ /* internally asserts if the queue overflows */ QActive_postFIFO(QF_active_[p], e); } } while (i != (uint8_t)0); } #endif // 执行一次垃圾回收,将引用计数器减1,这里就是对应开头那里的增加1 QF_gc(e); /* run the garbage collector, see NOTE01 */ }
为什么加锁,见硬件支持:比较并交换指令
二进制算法查找表
QF_log2Lkup[]映射字节值到 MSB 的 bit数字(找一个字节里的最高有效位所在的位置 1-8,可以通过表一一对应):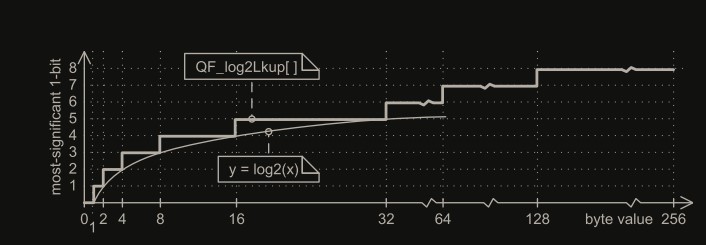
注意:横坐标有部分缩放,是不等距的
如果不用这个表,
运行时用$log_2(x)$算也可以,这会造成重复计算开销,嵌入式系统可以使用这种预配置的表,缺点是占用空间,比如这个表是 256 个单字节数组,占用 256 Bytes
时间管理
时间事件只能是静态的
一个时间事件在实例化时(在构造函数里)必须被分配一个信号,这个信号在后面不能被改变。后一个约束防止了时间事件在还被某个事件队列持有时,被意外的改变。
时间事件结构和接口
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
typedef struct QTimeEvtTag
{
// 从QEvent派生
QEvent super; /* derives from QEvent */
// 双向链表前后指针
struct QTimeEvtTag *prev; /* link to the previous time event in the list */
struct QTimeEvtTag *next; /* link to the next time event in the list */
// 存储了时间事件的接收者(其他类型的事件好像没有派生这个变量)
QActive *act; /* the active object that receives the time event */
// 每个tick(调用QF_tick())递减,直到0发送事件
QTimeEvtCtr ctr; /* the internal down-counter of the time event */
// 周期性时间事件的间隔,单次为0
QTimeEvtCtr interval; /* the interval for the periodic time event */
} QTimeEvt;
// 构造函数,里面会给事件一个信号,该事件可重用但不应修改它的信号
// 因为改了以后会导致原来接收这个事件的活动对象无法使用该事件
void QTimeEvt_ctor(QTimeEvt *me, QSignal sig);
// 为什么用do{...}while (0)之前提到过了,为了在宏里安全包裹多步操作
// 设置定时器,用于一次性时间事件
#define QTimeEvt_postIn(me_, act_, nTicks_) \
do \
{ \
(me_)->interval = (QTimeEvtCtr)0; \
QTimeEvt_arm_((me_), (act_), (nTicks_)); \
} while (0)
// 设置定时器,周期性时间事件
#define QTimeEvt_postEvery(me_, act_, nTicks_) \
do \
{ \
(me_)->interval = (nTicks_); \
QTimeEvt_arm_((me_), (act_), (nTicks_)); \
} while (0)
// 解除定时器
uint8_t QTimeEvt_disarm(QTimeEvt *me);
// 重设定时器
uint8_t QTimeEvt_rearm(QTimeEvt *me, QTimeEvtCtr nTicks);
/* private helper function */
// 把时间事件插入已设定的定时器的链接表内
void QTimeEvt_arm_(QTimeEvt *me, QActive *act, QTimeEvtCtr nTicks);
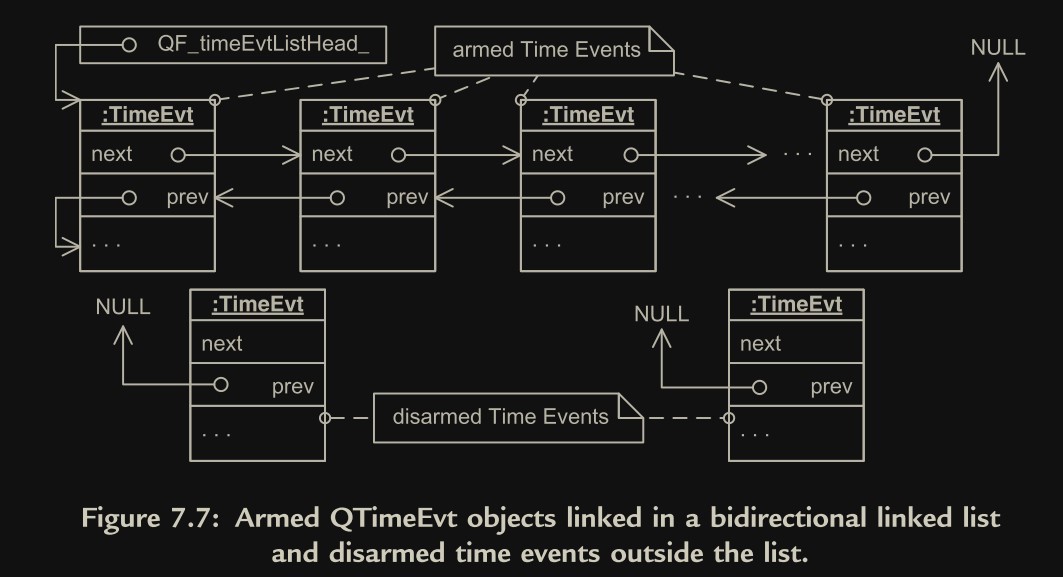
已被设定的时间事件放于链表中,已解除的不在链表中
系统时钟节拍和 QF_tick() 函数
QF 需要获取节拍管理时间事件,在老版本QP中一般就是在 ISR 中调用自己的 QF_tick()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
void QF_tick(void)
{ /* see NOTE01 */
QTimeEvt *t;
QF_INT_LOCK_KEY_
QF_INT_LOCK_();
// 从链表头开始
t = QF_timeEvtListHead_; /* start scanning the list from the head */
while (t != (QTimeEvt *)0)
{//t = t->next;遍历
// 每次调用减1
if (--t->ctr == (QTimeEvtCtr)0)
{ /* is time evt about to expire? */
// 到达倒计时
// 判断是否是周期性事件
if (t->interval != (QTimeEvtCtr)0)
{ /* is it periodic timeout? */
t->ctr = t->interval; /* rearm the time event */
}
else // 不是周期性事件
{ /* one-shot timeout, disarm by removing it from the list */
if (t == QF_timeEvtListHead_)
{
// 当前指针是头指针时,头指针直接指向next,即使next是空也没关系
QF_timeEvtListHead_ = t->next;
}
else
{
// 把定时器对象结点从链表中删除
if (t->next != (QTimeEvt *)0)
{ /* not the last event? */
t->next->prev = t->prev;
}
t->prev->next = t->next;
}
// 标记该结点为未使用状态
t->prev = (QTimeEvt *)0; /* mark the event disarmed */
}
QF_INT_UNLOCK_(); /* unlock interrupts before calling QF service */
/* postFIFO() asserts internally that the event was accepted */
// 发送事件
QActive_postFIFO(t->act, (QEvent *)t);
}
else
{
static uint8_t volatile dummy;
QF_INT_UNLOCK_();
// 在许多 CPU 里,中断解锁仅在下个机器指令后才生效,
// 对 dummy 变量的赋值需要几个机器指令,这是编译器没办法优化掉的。这确保中断被实际解锁
// 防止QF_INT_UNLOCK_和下一个QF_INT_LOCK_挨在一起,CPU要等一段时间才能重新上锁
dummy = (uint8_t)0; /* execute a few instructions, see NOTE02 */
}
// 为了下一次循环上锁
QF_INT_LOCK_(); /* lock interrupts again to advance the link */
t = t->next;
}
QF_INT_UNLOCK_();
}
QTicker
对于新版本的 QP,可选择不将定时器的管理放在 TICK ISR 中,而是一个专用的主动对象(QTicker)中,从而将定时器链表的的扫描操作从中断级降到线程级,降低了中断处理的负荷。
QTicker 是一个高效的活动对象,专门用于以指定的 tick 速率 [0...#QF_MAX_TICK_RATE] 处理 QF 系统时钟 tick。 将系统时钟滴答处理置于活动对象中,可以将非确定性 QTIMEEVT_TICK_X() 处理从中断级移除,并将其移入线程级,在线程级中可以根据需要降低优先级。
QTIMEEVT_TICK_X() 宏用于管理用户生成的周期性或非周期性定时器事件,每次执行时会扫描链表中是否有到期的定时器,并发送相应定时器事件。 将该操作放在线程级而非中断中能提高中断处理的性能。很像 Linux 内核中的中断下半部中的工作队列。
定义:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
class QTicker : public QP::QActive {
// 拥有两个成员变量,保存在其他地方
public:
//! constructor
explicit QTicker(std::uint_fast8_t const tickRate) noexcept;
void init(
void const * const e,
std::uint_fast8_t const qs_id) override;
void init(std::uint_fast8_t const qs_id) override;
// 重写了dispatch事件处理方法
void dispatch(
QEvt const * const e,
std::uint_fast8_t const qs_id) override;
// 重写了post_接收事件方法
bool post_(
QEvt const * const e,
std::uint_fast16_t const margin,
void const * const sender) noexcept override;
}; // class QTicker
构造函数:
1
2
3
4
5
6
7
8
// QTicker无需使用事件队列,事件队列相关参数m_head和m_tail都不会用到,
// 成员变量tickRate使用事件队列相关参数m_head保存
QTicker::QTicker(std::uint_fast8_t const tickRate) noexcept
: QActive(nullptr)
{
// reuse m_head for tick-rate
m_eQueue.m_head = static_cast<QEQueueCtr>(tickRate);
}
初始化:
1
2
3
4
5
6
7
8
9
void QTicker::init(
void const * const e,
std::uint_fast8_t const qs_id)
{
Q_UNUSED_PAR(e);
Q_UNUSED_PAR(qs_id);
// QTicker无需使用事件队列,用于表示事件计数的成员变量用事件队列相关参数m_tail保存
m_eQueue.m_tail = 0U;
}
重写接收事件方法:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
bool QTicker::post_(
QEvt const * const e,
std::uint_fast16_t const margin,
void const * const sender) noexcept
{
Q_UNUSED_PAR(e);
Q_UNUSED_PAR(margin);
Q_UNUSED_PAR(sender); // when Q_SPY not defined
QF_CRIT_STAT_
QF_CRIT_E_();
// 如果事件队列里没有事件
if (m_eQueue.m_frontEvt == nullptr) {
#ifdef Q_EVT_CTOR
static QEvt const tickEvt(0U, 0U);
#else
static QEvt const tickEvt = { 0U, 0U, 0U };
#endif // Q_EVT_CTOR
// 如果事件队列里没有事件,则添加一个tick事件
m_eQueue.m_frontEvt = &tickEvt; // deliver event directly
m_eQueue.m_nFree = (m_eQueue.m_nFree - 1U); // one less free event
QACTIVE_EQUEUE_SIGNAL_(this); // signal the event queue
}
// 如果事件队列里有事件,则什么也不做,不会不停向事件队列塞事件,这个事件只是为了让QF框架能去调用dispatch,所以只要有一个就行。
// account for one more tick event
// 取代事件队列的就是这个事件计数器(用m_tail保存),每次触发tick事件就加1,如果事件来不及处理,这里就会堆积,但绝不会丢失,除非超过m_tail(uint8_t类型)上限。
m_eQueue.m_tail = (m_eQueue.m_tail + 1U);
QS_BEGIN_NOCRIT_PRE_(QS_QF_ACTIVE_POST, m_prio)
QS_TIME_PRE_(); // timestamp
QS_OBJ_PRE_(sender); // the sender object
QS_SIG_PRE_(0U); // the signal of the event
QS_OBJ_PRE_(this); // this active object
QS_2U8_PRE_(0U, 0U); // pool-Id & ref-ctr
QS_EQC_PRE_(0U); // number of free entries
QS_EQC_PRE_(0U); // min number of free entries
QS_END_NOCRIT_PRE_()
QF_CRIT_X_();
return true; // the event is always posted correctly
}
重写 QActive 的事件处理函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
void QTicker::dispatch(
QEvt const * const e,
std::uint_fast8_t const qs_id)
{
Q_UNUSED_PAR(e);
Q_UNUSED_PAR(qs_id);
QF_CRIT_STAT_
QF_CRIT_E_();
QEQueueCtr nTicks = m_eQueue.m_tail; // # ticks since the last call
m_eQueue.m_tail = 0U; // clear the # ticks
QF_CRIT_X_();
// 成员变量tickRate(用m_head保存)表示每多少tick(tick中断)执行一次检查,和TICK_X的参数同义
// 当本AO被执行时处理所有堆积的事件。
for (; nTicks > 0U; --nTicks) {
QTimeEvt::TICK_X(static_cast<std::uint_fast8_t>(m_eQueue.m_head),
this);
}
}
arming 和 disarm 一个时间事件
QTimeEvt_arm_()用于把时间事件插入已设定的定时器的链接表内
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
void QTimeEvt_arm_(QTimeEvt *me, QActive *act, QTimeEvtCtr nTicks)
{
QF_INT_LOCK_KEY_
Q_REQUIRE((nTicks > (QTimeEvtCtr)0) /* cannot arm a timer with 0 ticks */
&& (((QEvent *)me)->sig >= (QSignal)Q_USER_SIG) /*valid signal */
&& (me->prev == (QTimeEvt *)0) /* time evt must NOT be used */
&& (act != (QActive *)0)); /* active object must be provided */
me->ctr = nTicks;
// Q_REQUIRE判断了me->prev == (QTimeEvt *)0,表示该结点未使用,
// 所以这里赋值一下(不是0就行,这里指向了自己),表示该结点对应的计时器已启用
// 后面会利用这个值判断该结点是否
me->prev = me; /* mark the timer in use */
me->act = act;
// 对链表的操作要加锁
QF_INT_LOCK_();
// 放到链表头部
me->next = QF_timeEvtListHead_;
if (QF_timeEvtListHead_ != (QTimeEvt *)0)
{
QF_timeEvtListHead_->prev = me;
}
QF_timeEvtListHead_ = me;
QF_INT_UNLOCK_();
}
QTimeEvt_disarm()用于关闭已经设定的定时器:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
uint8_t QTimeEvt_disarm(QTimeEvt *me)
{
uint8_t wasArmed;
QF_INT_LOCK_KEY_
QF_INT_LOCK_();
if (me->prev != (QTimeEvt *)0)
{ /* is the time event actually armed? */
// prev指针不为0表示已经被插入定时器链表了,但事件还没被发出去
// 返回1向调用者保证, 这个时间事件还没有被发送也不会被发送,仅对单次定时器有效,
// 因为多次的话即使事件发出去了,结点也还在链表内
wasArmed = (uint8_t)1;
// 从链表里删除
if (me == QF_timeEvtListHead_)
{
QF_timeEvtListHead_ = me->next;
}
else
{
if (me->next != (QTimeEvt *)0)
{ /* not the last in the list? */
me->next->prev = me->prev;
}
me->prev->next = me->next;
}
// 设定为未使用
me->prev = (QTimeEvt *)0; /* mark the time event as disarmed */
}
else
{ /* the time event was not armed */
// 定时器未启用,可能是从未启用,也有可能是事件已经发出去后被关闭了
wasArmed = (uint8_t)0;
}
QF_INT_UNLOCK_();
return wasArmed;
}
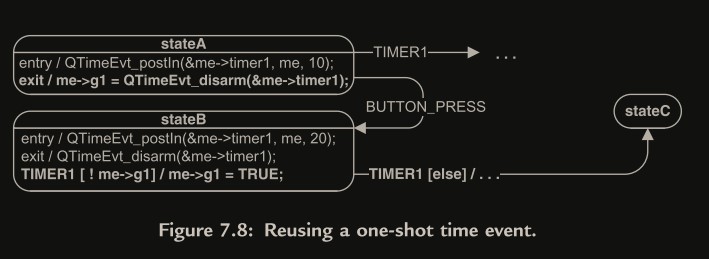
当状态机处于 A 状态时设置了一个定时事件,但在定时器生效前发生了状态切换到 B(图中触发的 BUTTON_PRESS 事件),此时 A 设定的定时事件还存在,QF 框架还会给当前状态机发事件,当 B 收到该事件后用自己的处理方式处理,就会有问题,因为这个是状态 A 设定的,B 没设定过,不同状态的对同一信号的处理是不同的。
这时需要 A 在退出前关闭定时器(利用在 exit()中执行 QTimeEvt_disarm()),且用一个全局变量通知其他状态不要用已经在事件队列里的属于状态 A 的定时事件
原生 QF 事件队列
使用 QEQueue 数据结构管理,有两种类型:
第一个变体是特别为活动对象设计和优化的事件队列
原生 QF 事件队列放弃的功能:
- 比如可变尺寸的消息(原生 QF 事件队列是固定
等长的,仅存储指向事件的指针) - 阻塞在一个满队列(原生 QF 事件队列在
插入时不能被阻塞,即使队列已满,不能处理满的情况) - 定时阻塞在空队列(原生 QF 事件队列永远阻塞在空队列,意味着该线程不会在超时后去做其他事情)
- 比如可变尺寸的消息(原生 QF 事件队列是固定
另一个更简单的 QF 事件队列的变体,是一个通用的“原始的”
线程安全的不能阻塞的队列
QEQueue 结构
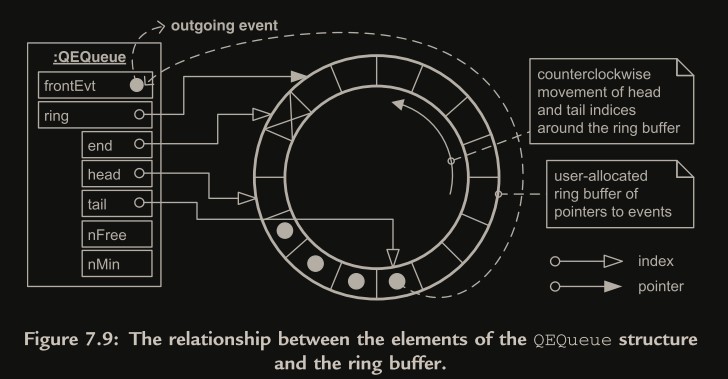
这个图片好像画错了
QEQueue 环形队列里存放的是事件指针(QEvent*),在 32 位机里就是等长的 4 个字节,指向事件实例
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
#ifndef QF_EQUEUE_CTR_SIZE
#define QF_EQUEUE_CTR_SIZE 1
#endif
#if (QF_EQUEUE_CTR_SIZE == 1)
typedef uint8_t QEQueueCtr;
#elif (QF_EQUEUE_CTR_SIZE == 2)
typedef uint16_t QEQueueCtr;
#elif (QF_EQUEUE_CTR_SIZE == 4)
typedef uint32_t QEQueueCtr;
#else
#error "QF_EQUEUE_CTR_SIZE defined incorrectly, expected 1, 2, or 4"
#endif
typedef struct QEQueueTag
{
// 该值和tail位置的值相同,指向下一个要被使用的事件,frontEvt为空表示队列为空队列
QEvent const *frontEvt; /* pointer to event at the front of the queue */
// 环形队列起始位置指针
QEvent const **ring; /* pointer to the start of the ring buffer */
// 环形队列结束偏移
QEQueueCtr end; /* offset of the end of the ring buffer from the start */
// 事件队列头(入队位置,FIFO)
QEQueueCtr head; /* offset to where next event will be inserted */
// 事件队列尾(出队位置;入队位置,LIFO)
QEQueueCtr tail; /* offset of where next event will be extracted */
// 环形队列空闲数量
QEQueueCtr nFree; /* number of free events in the ring buffer */
// 最小空闲事件数,跟踪队列使用的最差情况,用于微调环形缓存的尺寸
QEQueueCtr nMin; /* minimum number of free events ever in the buffer */
} QEQueue;
QEQueue 的初始化
1
2
3
4
5
6
7
8
9
10
11
12
// 参数qSto为预分配空间
void QEQueue_init(QEQueue *me, QEvent const *qSto[], QEQueueCtr qLen)
{
me->frontEvt = (QEvent *)0; /* no events in the queue */
// 取指针数组的地址
me->ring = &qSto[0];
me->end = qLen;
me->head = (QEQueueCtr)0;
me->tail = (QEQueueCtr)0;
me->nFree = qLen; /* all events are free */
me->nMin = qLen; /* the minimum so far */
}
qSto==NULL 和 qLen=0 将队列设置为仅 1 个容量,因为 fromtEvt 也算一个
原生 QF 活动对象队列
活动对象事件队列的接口包含 3 个函数: QActive_postFIFO(),QActive_postLIFO()和 QActive_get_()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
// 返回一个指向静态QEvent的指针
QEvent const *QActive_get_(QActive *me)
{
QEvent const *e;
QF_INT_LOCK_KEY_
QF_INT_LOCK_();
// 阻塞直到队列不为空(视实现而定,非抢占式的可能不阻塞)
QACTIVE_EQUEUE_WAIT_(me); /* wait for event queue to get an event */
// 取frontEvt的值,而不是找ring内的tail
e = me->eQueue.frontEvt;
// end初始化赋值为qLen,可以表示ring总长,这里判断是否全空
if (me->eQueue.nFree != me->eQueue.end)
{ /* any events in the buffer? */
/* remove event from the tail */
// 从tail取到frontEvt
me->eQueue.frontEvt = me->eQueue.ring[me->eQueue.tail];
// index为0表示绕尾
if (me->eQueue.tail == (QEQueueCtr)0)
{ /* need to wrap the tail? */
// 绕尾就要把值从0直接变成尾部的qLen,然后减1就是绕尾后的index
me->eQueue.tail = me->eQueue.end; /* wrap around */
}
// 从tail取出,tail递减
--me->eQueue.tail;
// 空闲数增加
++me->eQueue.nFree; /* one more free event in the ring buffer */
}
else // 如果全空
{
me->eQueue.frontEvt = (QEvent *)0; /* queue becomes empty */
// 队列为空信号
QACTIVE_EQUEUE_ONEMPTY_(me);
}
QF_INT_UNLOCK_();
return e;
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
void QActive_postFIFO(QActive *me, QEvent const *e)
{
QF_INT_LOCK_KEY_
QF_INT_LOCK_();
if (e->dynamic_ != (uint8_t)0)
{ /* is it a dynamic event? */
++((QEvent *)e)->dynamic_; /* increment the reference counter */
}
if (me->eQueue.frontEvt == (QEvent *)0) // 为空
{ /* empty queue? */
// 如果为空就直接赋值给frontEvt,不需要插入head再赋值给frontEvt
me->eQueue.frontEvt = e; /* deliver event directly */
// 出现事件,发送队列非空信号给QActive_get_()的QACTIVE_EQUEUE_WAIT_()
QACTIVE_EQUEUE_SIGNAL_(me); /* signal the event queue */
}
else // 不为空
{ /* queue is not empty, insert event into the ring-buffer */
/* the queue must be able to accept the event (cannot overflow) */
// 事件队列不能满,满的情况不能处理,用断言退出
Q_ASSERT(me->eQueue.nFree != (QEQueueCtr)0);
/* insert event into the ring buffer (FIFO) */
// head位置插入
me->eQueue.ring[me->eQueue.head] = e;
// 绕尾
if (me->eQueue.head == (QEQueueCtr)0)
{ /* need to wrap the head? */
// 绕尾就要把值从0直接变成尾部的qLen,然后减1就是绕尾后的index
me->eQueue.head = me->eQueue.end; /* wrap around */
}
// 递减head
--me->eQueue.head;
// 递减free
--me->eQueue.nFree; /* update number of free events */
if (me->eQueue.nMin > me->eQueue.nFree)
{
// nFree更小时,更新nMin
me->eQueue.nMin = me->eQueue.nFree; /* update min so far */
}
}
QF_INT_UNLOCK_();
}
“原始的”线程安全的队列
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
/* Application header file -----------------------------------------------*/
#include "qequeue.h"
extern QEQueue APP_isrQueue; /* global “raw” queue */
typedef struct IsrEvtTag
{ /* event with parameters to be passed to the ISR */
QEvent super;
...
} IsrEvt;
/* ISR module ------------------------------------------------------------*/
QEQueue APP_isrQueue; /* definition of the “raw” queue */
// 自定义ISR中断处理程序
void interrupt myISR()
{
QEvent const *e;
// 取一个事件,这里的QEQueue_get()即使队列为空也不阻塞
... e = QEQueue_get(&APP_isrQueue); /* get an event from the “raw” queue */
/* event available? */
if (e != (QEvent *)0)
{// 执行事件
Process the event e(could be dispatching to a state machine)
...
// 因为是ISR管理事件,不是QF框架,要记得回收空间
QF_gc(e); /* explicitly recycle the event */
}
...
}
/* Active object module --------------------------------------------------*/
QState MyAO_stateB(MyAO *me, QEvent const *e)
{
switch (e->sig)
{
...
case SOMETHING_INTERESTING_SIG:
{
IsrEvt *pe = Q_NEW(IsrEvt, ISR_SIG);
pe->... = ... /* set the event attributes */
// 发送事件
QEQueue_postFIFO(&APP_isrQueue, (QEvent *)pe);
return (QSTATE)0;
}
...
}
return (QState)&MyAO_stateA;
}
/* main module -----------------------------------------------------------*/
static QEvent *l_isrQueueSto[10]; /* allocate a buffer for the “raw” queue */
main()
{
...
/* initialize the “raw” queue */
// 初始化事件队列
QEQueue_init(&APP_isrQueue, l_isrQueueSto, Q_DIM(l_isrQueueSto));
...
}
QEQueue 函数 QEQueue_postFIFO() , QEQueue_postLIFO() 和 QEQueue_get()的实现是非常直接的,因为不需要平台相关的宏。所有这些函数都是可重入的(多线程安全),因为它们使用临界区代码维护队列的完整性。
原生 QF 内存池
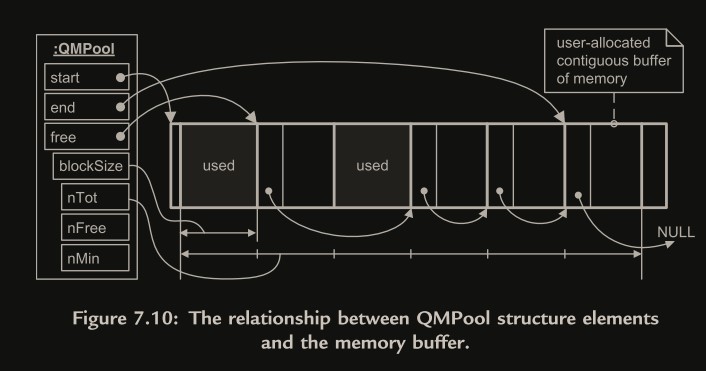
图中粗黑线框起来的是一个块,细黑线分割了一个块,左边为下一空闲块指针。通过这种方法重用了空闲块的空间,不需要单独找地方存一张空闲表了
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
typedef struct QMPoolTag
{
// 空闲表表头,即首个空闲块的地址
void *free; /* the head of the linked list of free blocks */
// 池开始块地址
void *start; /* the start of the original pool buffer */
// 池结束块地址
void *end; /* the last block in this pool */
// 块大小
QMPoolSize blockSize; /* maximum block size (in bytes) */
// 块数量
QMPoolCtr nTot; /* total number of blocks */
// 空闲块数量
QMPoolCtr nFree; /* number of free blocks remaining */
// 空闲块曾经出现过的最小数量,用于分析使用情况
QMPoolCtr nMin; /* minimum number of free blocks ever in this pool */
} QMPool
原生 QF 内存池的初始化
QFreeBlock 结构用于对不同架构 CPU 实现内存对齐:
1
2
3
4
// 空闲链表结点,里面就一个指针
typedef struct QFreeBlockTag {
struct QFreeBlockTag *next;
} QFreeBlock;
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
void QMPool_init(QMPool *me, void *poolSto,
uint32_t poolSize, QMPoolSize blockSize)
{
// 空闲链表
QFreeBlock *fb;
uint32_t corr;
uint32_t nblocks;
/* The memory block must be valid
* and the poolSize must fit at least one free block
* and the blockSize must not be too close to the top of the dynamic range
*/
Q_REQUIRE((poolSto != (void *)0) // 预分配空间不能为空
&& (poolSize >= (uint32_t)sizeof(QFreeBlock)) // 池大小必须能够至少放入一个空闲块,后面有断言poolSize >= (uint32_t)blockSize,这里只是一种判断条件
&& ((QMPoolSize)(blockSize + (QMPoolSize)sizeof(QFreeBlock))
> blockSize)); // blockSize值不应该接近QMPoolSize类型值上限,比如QMPoolSize是uint16,
// blockSize不应该接近65535,如果blockSize为65532,
// 这里加上QFreeBlock指针的4,就会溢出回绕,最终比blockSize小。
/*lint -e923 ignore MISRA Rule 45 in this expression */
// (uint32_t)sizeof(QFreeBlock) - (uint32_t)1得到非对齐mask,如4-1=3=0x0011,如果是对齐地址,&操作后应该为0(相当于除以4的余数),非对齐则不为0
corr = ((uint32_t)poolSto & ((uint32_t)sizeof(QFreeBlock) - (uint32_t)1));
if (corr != (uint32_t)0) // 未对齐
{ /* alignment needed? */
// 算对齐误差
corr = (uint32_t)sizeof(QFreeBlock) - corr; /*amount to align poolSto*/
// poolSize相应缩小,放弃未对齐部分
poolSize -= corr; /* reduce the available pool size */
}
/*lint -e826 align the head of free list at the free block-size boundary*/
// 开始给QPool赋值,强制对齐下,会丢弃未对齐部分,从对齐地址开始使用
me->free = (void *)((uint8_t *)poolSto + corr);
/* round up the blockSize to fit an integer # free blocks, no division */
// me->blockSize通过运算变为blockSize
me->blockSize = (QMPoolSize)sizeof(QFreeBlock); /* start with just one */
// nblocks的计算避免用到除法,而是用while做加法计算
// nBlocks = (blockSize + sizeof(QFreeBlock) – 1)/sizeof(QFreeBlock + 1)
nblocks = (uint32_t)1; /* # free blocks that fit in one memory block */
// 加法增加,也能保证me->blockSize是sizeof(QFreeBlock)的整数倍,保证了每个块的地址也是对齐的
while (me->blockSize < blockSize)
{
me->blockSize += (QMPoolSize)sizeof(QFreeBlock);
++nblocks;
}
blockSize = me->blockSize; /* use the rounded-up value from now on */
/* the pool buffer must fit at least one rounded-up block */
Q_ASSERT(poolSize >= (uint32_t)blockSize);
/* chain all blocks together in a free-list... */
// 第一个直接减掉,因为已经加进链表了,见下面的while循环
poolSize -= (uint32_t)blockSize; /*don’t link the last block to the next */
// 不是从0开始,因为第一个就是me->free,已经在了,见下面while循环
me->nTot = (QMPoolCtr)1; /* the last block already in the pool */
// 空闲队列指针赋值
fb = (QFreeBlock *)me->free; /*start at the head of the free list */
while (poolSize >= (uint32_t)blockSize)
{ /* can fit another block? */
// TODO:这里的nblocks应该是me->nTot吧
fb->next = &fb[nblocks]; /* point the next link to the next block */
// 链表生成
fb = fb->next; /* advance to the next block */
poolSize -= (uint32_t)blockSize; /* reduce the available pool size */
++me->nTot; /* increment the number of blocks so far */
}
fb->next = (QFreeBlock *)0; /* the last link points to NULL */
me->nFree = me->nTot; /* all blocks are free */
me->nMin = me->nTot; /* the minimum number of free blocks */
me->start = poolSto; /* the original start this pool buffer */
me->end = fb; /* the last block in this pool */
}
许多 CPU 架构对指针的正确
对齐有特别的要求。例如,ARM处理器需要一个指针被分配在一个可以被 4 整除的地址。其他的 CPU,比如Pentium,可以接受分配在奇数地址的指针,但是当指针在可被 4 整除的地址对齐时,执行性能会更加好。
从池里获得一个内存块
使用 QMPool_get() 从内存池获取一个块,支持耗尽,耗尽返回 NULL。
之前在动态事件分配中提到如果是内存池用于动态事件队列,由于 QF 不支持
满队列(耗尽),所以用完无法插入队列时会直接断言报错。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
void *QMPool_get(QMPool *me)
{
QFreeBlock *fb;
QF_INT_LOCK_KEY_
QF_INT_LOCK_();
fb = (QFreeBlock *)me->free; /* get a free block or NULL */
if (fb != (QFreeBlock *)0)
{ /* free block available? */
me->free = fb->next; /* adjust list head to the next free block */
--me->nFree; /* one less free block */
if (me->nMin > me->nFree)
{
me->nMin = me->nFree; /* remember the minimum so far */
}
}
QF_INT_UNLOCK_();
return fb; /* return the block or NULL pointer to the caller */
}
把一个内存块回收到池内
QMPool_put() 用来把块回收到池内
1
2
3
4
5
6
7
8
9
10
11
12
13
// b是要回收的块的地址
void QMPool_put(QMPool *me, void *b)
{
QF_INT_LOCK_KEY_
Q_REQUIRE((me->start <= b) && (b <= me->end) /* must be in range */
// TODO: 这里应该是小于不是小于等于,等于说明全空闲,就不能再释放了
&& (me->nFree <= me->nTot)); /* # free blocks must be < total */
QF_INT_LOCK_();
((QFreeBlock *)b)->next = (QFreeBlock *)me->free; /* link into free list */
me->free = b; /* set as new head of the free list */
++me->nFree; /* one more free block in this pool */
QF_INT_UNLOCK_();
}
原生 QF 优先级集合
可以用来表示活动对象优先级,此时每一位对应一个活动对象
1
2
3
4
5
typedef struct QPSet64Tag
{
uint8_t bytes; /* condensed representation of the priority set */
uint8_t bits[8]; /* bitmasks representing elements in the set */
} QPSet64;
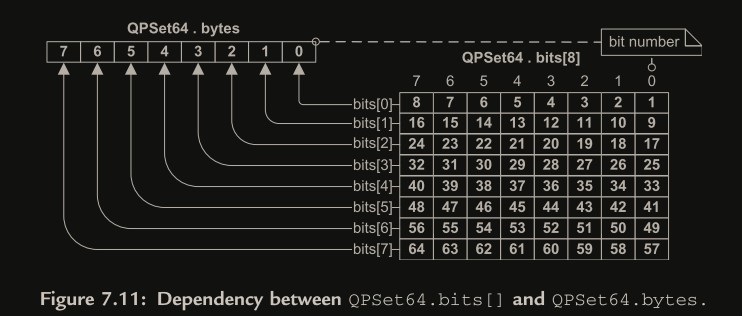
uint8_t bits[8]一共是 8 个 1 字节共 64 位,对应图上的 8x8 矩阵(bitmask),bits[0]表示第 1 行,bits[7]表示第 8 行
uint8_t bytes用于加快 bitmask 查找,用来指示对应行的位中是否有至少一个 1(字节值大于等于 1)。相当于是把 1 个字节压缩成 1 位,将 8 个字节看成 1 个字节处理。如bytes的第0位指示bits[0]是否大于等于 1,如大于等于 1 则为 1。bytes 为0x10010001表示bytes[0]、bytes[4]、bytes[7]大于等于 1。
判断集合是否为空:
1
#define QPSet64_notEmpty(me_) ((me_)->bytes != (uint8_t)0)
找出集合里最大的元素:
1
2
3
4
5
6
7
// 先找bytes最高位,在找最高位对应的bits的最高位,bytes移位算偏移后相加
#define QPSet64_findMax(me_, n_) \
do \
{ \
(n_) = (uint8_t)(QF_log2Lkup[(me_)->bytes] - 1); \
(n_) = (uint8_t)(((n_) << 3) + QF_log2Lkup[(me_)->bits[n_]]); \
} while (0)
二进制对数查找表
QF_log2Lkup见发行-订阅事件发送的发行一节
插入一个值:
1
2
3
4
5
6
#define QPSet64_insert(me_, n_) \
do \
{ \
(me_)->bits[QF_div8Lkup[n_]] |= QF_pwr2Lkup[n_]; \
(me_)->bytes |= QF_pwr2Lkup[QF_div8Lkup[n_] + 1]; \
} while (0)
字节索引
QF_div8Lkup[p] = (p – 1)/8(把值转为 bits 的索引),找字节内偏移QF_pwr2Lkup[p] = 1 << ((p – 1) % 8)(p-1 是因为偏移和索引都是从 0 开始,参数 p 是从 1 开始)
先给 bits 赋值,再给 bytes 赋值
移除一个值:
1
2
3
4
5
6
7
8
9
#define QPSet64_remove(me_, n_) \
do \
{ \
(me_)->bits[QF_div8Lkup[n_]] &= QF_invPwr2Lkup[n_]; \
if ((me_)->bits[QF_div8Lkup[n_]] == (uint8_t)0) \
{ \
(me_)->bytes &= QF_invPwr2Lkup[QF_div8Lkup[n_] + 1]; \
} \
} while(0)
QF_invPwr2Lkup[p]清除对应位
原生合作式 vanilla 内核
QF 包含了一个简单的合作式 vanilla 内核
在计算机科学领域,
香草vanilla是一个用于表示“一个事物没有经过自定义的改动而仍然保留着它们默认的形式”的术语。这个术语已经广为流传并成为事实标准。香草一词来自于传统冰淇淋的标准口味,香草味。根据 Eric S. Raymond 的《The New Hacker’s Dictionary》一书记载,香草一词在感觉上比普通一词更能表达“默认”的含义。维基百科:香草软件
vanilla 内核通过在一个无限循环内不断查询所有活动对象的事件队列来工作。内核总是挑选最高优先级的预备运行(非空事件队列)的活动对象
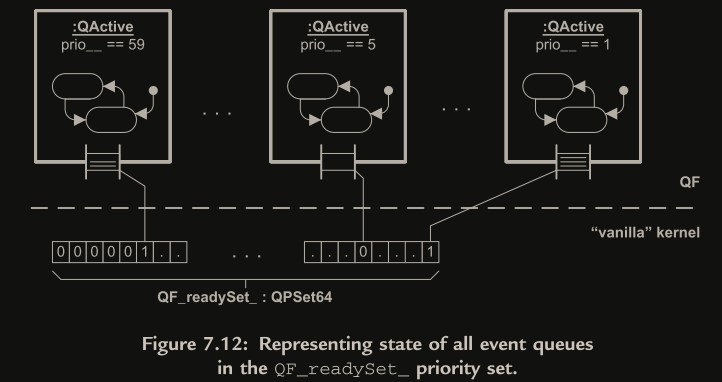
图中所示 QPSet64 类型的 QF_readySet_ 优先级集合用于表示系统内所有非空事件队列的“预备集合”,每一位对应一个活动对象。活动对象的事件队列为非空时对应位置 1 ,为空时置 0
qvanilla.c 源文件
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
#include "qf_pkg.h"
#include "qassert.h"
/* Package-scope objects -----------------------------------------------*/
// 禁止优化,因为可能在中断中改变
QPSet64 volatile QF_readySet_; /* QF-ready set of active objects */
/*.....................................................................*/
void QF_init(void)
{
/* nothing to do for the “vanilla” kernel */
}
/*.....................................................................*/
void QF_stop(void)
{
/* nothing to cleanup for the “vanilla” kernel */
QF_onCleanup(); /* cleanup callback */
}
/*.....................................................................*/
// main()中调用QF_run(),把控制权转让给QF框架,也就是运行 vanilla 内核
void QF_run(void)
{ /* see NOTE01 */
uint8_t p;
QActive *a;
QEvent const *e;
QF_INT_LOCK_KEY_
// 配置回调函数并启动中断
QF_onStartup(); /* invoke the QF startup callback */
for (;;)
{ /* the background loop */
QF_INT_LOCK_();// 处理QF_readySet_上锁
// 是否有事件要处理
if (QPSet64_notEmpty(&QF_readySet_))
{ // 获取有事件的最高优先级的活动对象
QPSet64_findMax(&QF_readySet_, p);
a = QF_active_[p];
QF_INT_UNLOCK_(); // 中断上锁是为了处理QF_readySet_,现在可以解锁了
// 找这个活动对象的第一个待处理事件
e = QActive_get_(a); /* get the next event for this AO */
// 执行状态函数
QF_ACTIVE_DISPATCH_(&a->super, e); /* dispatch to the AO */
QF_gc(e); /* determine if event is garbage and collect it if so */
}
else // 没有事件的话不阻塞,要做其他事情,比如进入低功耗模式
// 进入Idle函数前必须上锁,这是为了防止这时候其他任务通过中断产生了事件,因为vanilla 内核的非抢占性,导致依然按照原流程进入idle状态,这个事件就不能被及时处理了(像QK内核就可以在事件发生的时候在中断里就产生一次调度,把进入idle的动作抢占了)
// 进入后在开启低功耗模式前必须解锁中断,防止死锁,因为需要中断来唤醒,不解锁中断就唤醒不了
{ /* all active object queues are empty */
#ifndef QF_INT_KEY_TYPE // QF_onIdle是否有参数取决于临界区机制
QF_onIdle(); /* see NOTE02 */
#else
QF_onIdle(intLockKey_); /* see NOTE02 */
#endif /* QF_INT_KEY_TYPE */
}
}
}
/*.....................................................................*/
// 启动活动对象线程
void QActive_start(QActive *me, uint8_t prio,
QEvent const *qSto[], uint32_t qLen,
void *stkSto, uint32_t stkSize,
QEvent const *ie)
{
Q_REQUIRE(((uint8_t)0 < prio) && (prio <= (uint8_t)QF_MAX_ACTIVE)
&& (stkSto == (void *)0)); /* does not need per-actor stack */
(void)stkSize; /* avoid the “unused parameter” compiler warning */
QEQueue_init(&me->eQueue, qSto, (QEQueueCtr)qLen); /* initialize QEQueue */
me->prio = prio; /* set the QF priority of this active object */
QF_add_(me); /* make QF aware of this active object */
QF_ACTIVE_INIT_(&me->super, ie); /* execute initial transition */
}
/*.....................................................................*/
void QActive_stop(QActive *me)
{
QF_remove_(me);
}
QF_onIdle()是否有参数取决于QF 里的临界区类型,当使用简单的“无条件中断解锁”策略时,这个函数没有参数,但是在使用“保存和恢复中断状态” 策略时,它需要中断状态参数。
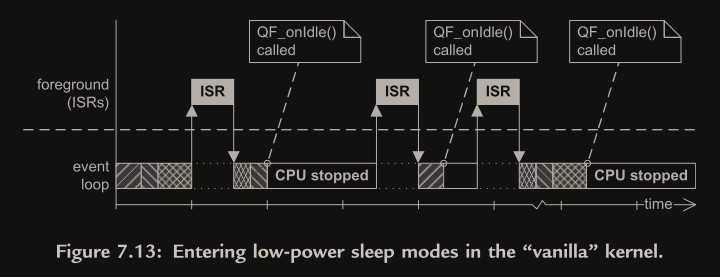
如图,如果进入 Idle 函数前不关中断,就会产生竞争,可能就有新事件插入了。然后 Idle 处理进入低功耗模式就不能及时响应这个事件了。
解决办法就是进 Idle 前关中断,然后在进 Idle 后且进入低功耗模式的同时开中断,注意这个“同时”,需要实现原子操作,也就是 MCU 的支持。
qvanilla.h 头文件
这个头文件最重要的功能是在事件被发送到和从活动对象事件队列移除时更新预备集合 (QF_readySet_)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
#ifndef qvanilla_h
#define qvanilla_h
#include "qequeue.h" /* “Vanilla” kernel uses the native QF event queue */
#include "qmpool.h" /* “Vanilla” kernel uses the native QF memory pool */
#include "qpset.h" /* “Vanilla” kernel uses the native QF priority set */
/* the event queue and thread types for the “Vanilla” kernel */
#define QF_EQUEUE_TYPE QEQueue // 使用QEQueue作为事件队列
/* native QF event queue operations */
#define QACTIVE_EQUEUE_WAIT_(me_) \ // 不阻塞,仅当它确信事件队列拥有最少一个事件时,它才调用 QActive_get_()
Q_ASSERT((me_)->eQueue.frontEvt != (QEvent *)0)
#define QACTIVE_EQUEUE_SIGNAL_(me_) \ // 发给空队列时修改优先集合
QPSet64_insert(&QF_readySet_, (me_)->prio)
#define QACTIVE_EQUEUE_ONEMPTY_(me_) \ // 删除后成空队列时修改优先集合
QPSet64_remove(&QF_readySet_, (me_)->prio)
/* native QF event pool operations */
#define QF_EPOOL_TYPE_ QMPool // 使用QMPool作为事件池
#define QF_EPOOL_INIT_(p_, poolSto_, poolSize_, evtSize_) \
QMPool_init(&(p_), poolSto_, poolSize_, evtSize_)
#define QF_EPOOL_EVENT_SIZE_(p_) ((p_).blockSize)
#define QF_EPOOL_GET_(p_, e_) ((e_) = (QEvent *)QMPool_get(&(p_)))
#define QF_EPOOL_PUT_(p_, e_) (QMPool_put(&(p_), e_))
// 共享变量声明为volatile不允许优化
extern QPSet64 volatile QF_readySet_; /** QF-ready set of active objects */
#endif /* qvanilla_h */
可抢占式“运行-到-完成”内核
选择一个可抢占式内核的理由
正常情况并不需要可抢占式内核:
- 长过程被分割成了
短的 RTC(run-to-completion) 步骤,不需要内核来分割(QP 从设计层面就避免了长过程,如果用可抢占式内核就可以通过内核调度分割长过程) - 活动对象执行线程不会
阻塞(不阻塞意味着 CPU 控制权会在 RTC 步骤执行完成时被让出) - RTC 步骤足够短,
响应延迟较低
需要可抢占式内核的情况:
需要密集的、对时序有极高要求的任务,且低优先级的任务 RTC 时间较长且不容易分解。
以一个 GPS 接收机系统为例。这个接收机在一个定点 CPU 上执行大量的浮点运算去计算 GPS 的位置(计算步骤不容易分解,且占用较长 RTC 时间)。同时, GPS 接收机必须跟踪 GPS 卫星的信号,这牵涉到在小于毫秒级间隔内的闭环控制回路。很明显我们不容易把位置计算分解成足够短的 RTC 步骤从而允许可靠的信号跟踪,即使把信号跟踪定义为最高优先级,低优先级的 RTC 过程过长依然会影响时序。
定点和浮点详见定点 vs 浮点数字信号处理
RTC 内核简介
使用单堆栈的可抢占式多任务处理
常规实时内核需要为每个任务配置单独的堆栈,还要维护复杂的执行上下文。
需要在切换时保存上下文到任务独立的栈的原因是调度的不确定性,例:
A 切 B, B 切 C, C 切 D, D 切 A,此时 A 的上下文信息如果在全局栈中,必须把 B C D 的上下文全部出栈,这显然是不合理的,所以必须为每个任务单独配置堆栈,并在切换时把上下文信息保存在任务独立的栈中。
对于可确定调度顺序(基于优先级)而且遵从运行到完成规范的任务,就可以把每个任务的上下文信息都保存在全局栈中,例:
A 发事件给 B,因为 B 的优先级更高,所以内核立刻调度到 B,并把 A 的上下文保存到全局栈中,B 也可以发送事件给更高优先级的任务并执行,这样就形成嵌套,因为任务都是运行到完成,所以等栈顶任务执行完可以有序退出。
这种调度策略和基于优先级的中断控制器逻辑非常像。而且和函数的嵌套调用过程也非常像
非阻塞型内核
上面说的 RTC 内核有个局限,就是不能阻塞。原因就是虽然看上去是调度,但实际上还是一个连续执行的过程,就像函数的嵌套调用一样,不允许中间有阻塞。不过活动对象的设计就是不阻塞的,这也不是问题。
同步抢占和异步抢占
同步抢占
当一个较低优先级任务发送一个事件给一个较高优先级任务时,内核必须立刻暂停较低优先级任务的执行,并启动较高优先级的任务。
异步抢占
在
中断 ISR中发送一个事件给一个比被中断的任务更高优先级的任务时,当这个 ISR完成后,内核必须启动较高优先级任务的执行,而不是恢复这个较低优先级的任务。(因为中断的优先级总是比任务高,必须运行到完成后才运行执行任务)
同步抢占:
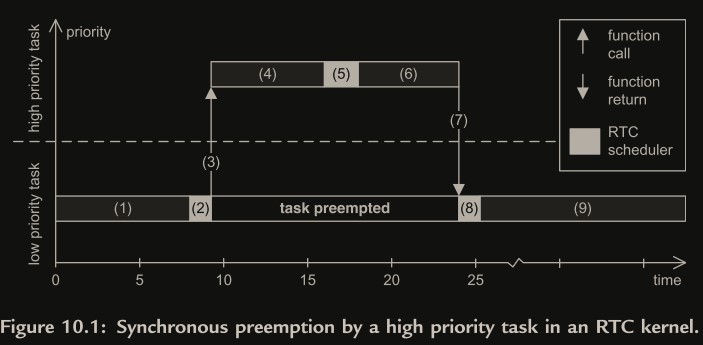
- (2)时低优先级任务发送事件给高优先级任务,且调度器开始调度。
- (5)时高优先级任务发送事件给低优先级任务,调度器不执行调度,
- (7)时高优先级任务运行完成并返回(2)时调用的调度器。
- (8)调度器再一次检查是否有一个较高优先级任务准备运行,但是它没找到。 RTC 调度器返回低优先级任务。
异步抢占:
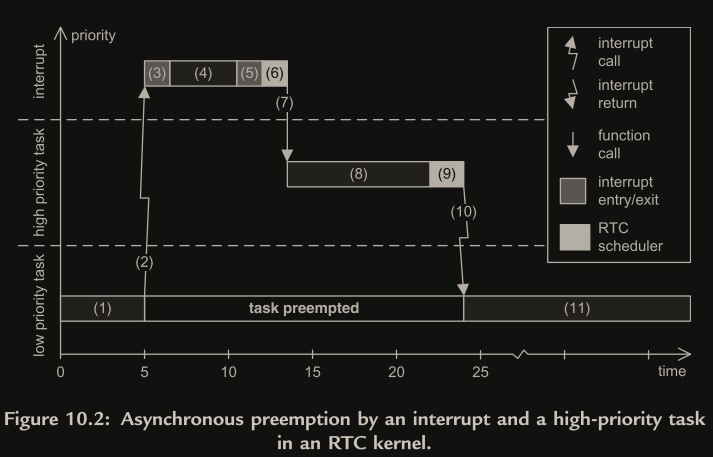
- (3)中断服务程序 (ISR) 执行
RTC 内核特定的进入动作,它在一个堆栈变量中保存被中断任务的优先级,把 RTC 内核的当前优先级提升到 ISR 层(在任何任务之上)。这一步是为了防止第(4)步产生事件导致的调度,因为此时内核优先级比那个任务优先级高,就不会在 ISR 内部触发调度动作 - (4)ISR 发送了一个事件给高优先级任务,发送事件的动作会让 RTC 调度器工作,它
立即返回,因为没有任务有比当前的优先级更高的优先级(ISR 优先级比任何任务高)。ISR继续运行 - (5)ISR 继续运行,最后执行 RTC 内核相关的
退出动作 (6)RTC 内核相关的 ISR 退出,发送 End-Of-Interrupt(
EOI) 指令给中断控制器,恢复被中断任务的被保留的优先级,并调用RTC 调度器。退出中断有
EOI和IRET两步,EOI 表示停止对当前的中断嵌套层进行优先级排序(此时可以插入任意优先级新中断),IRET 表示从中断返回。这一步只发 EOI 表示还不想从中断返回- (7)调度器
开中断,并开始调度到高优先级任务。此时 RTC 调度器没有返回。 - (9)高优先级任务执行完毕并返回到 RTC 调度器
- (10)IRET 执行,IRET 恢复低优先级任务的上下文,从(2)开始的中断返回
在第 (5) 步 RTC 内核相关的中断退出(执行 EOI 后)里,中断处理在概念上已经结束了,即使中断堆栈帧(interrupt stack frame) 继续保留在堆栈上并且 IRET 指令还没执行。在 EOI 指令之前,中断控制器仅允许比当前正在服务的中断更高优先级的中断。在 EOI 指令后,通过调用 RTC 调度器,中断被解锁,中断控制器允许所有的级别的中断,这正是在任务层所期望的行为。这样的话在(8)中高优先级任务执行时依旧可以触发中断和异步调度
堆栈的利用
同步抢占:
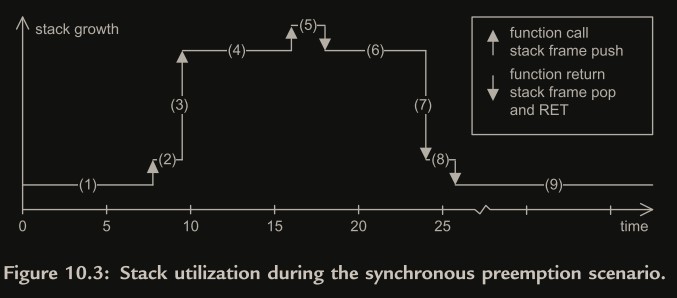
- (2)发送事件给高优先级任务,调用了 RTC 调度器,
调度器堆栈帧(stack frame)入栈所以栈增长了 - (3)RTC 调度器调用高优先级任务,
任务堆栈帧(stack frame)入栈,栈再次增长 - (5)高优先级任务发送事件给低优先级任务,调用了 RTC 调度器,调度器堆栈帧(stack frame)
入栈,随后因为不满足调度条件立即返回,调度器堆栈帧(stack frame)出栈 - (7)任务堆栈帧(stack frame)
出栈 - (8)调度器在调度完成后
再次检查是否有较高优先级的任务要运行,没有就出栈
异步抢占:
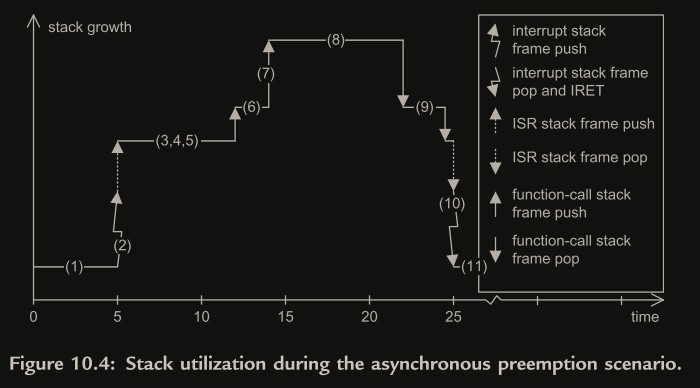
- (2)发生中断,由硬件控制将中断堆栈帧压栈,ISR 开始运行,并可能把某些别的上下文压入堆栈 (就是 ISR 程序,虚线所示)
- (4)TODO:应该会发送事件触发一次调度器调用,怎么栈没增加
- (6)RTC 调度器被调用,堆栈帧入栈
- (7)使能中断并调度到高优先级任务,堆栈帧入栈
- (8)高优先级任务运行到结束,出栈
- (9)调度器再次检查,没有就出栈
- (10)ISR 出栈(虚线),硬件执行 IRET 指令,中断出栈
和传统可抢占式内核的比较
通过在一个堆栈管理所有的任务和中断的上下文, RTC 内核运行所需的 RAM 远比一个典型的阻塞式内核需要的少。
C 编译器生成的 ISR 进入时仅保留可能在 C 函数被使用那些寄存器,而不是全部,比传统的少,降低了进入 ISR 时的堆栈和 CPU 消耗
QK 的实现
QK 源代码的组织
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
<qp>\qpc\ - QP/C root directory (<qp>\qpcpp for QP/C++)
|
+-include\ - QP platform-independent header files
| +-qk.h - QK platform-independent interface
| +-. . .
|
+-qk\ - QK preemptive kernel
| +-source\ - QK platform-independent source code (*.C files)
| | +-qk_pkg.h - internal, interface for the QK implementation
| | +-qk.c - definitionofQK_getVersion()andQActive_start()
| | +-qk_sched.c - definition of QK_schedule_()
| | +-qk_mutex.c - definition of QK_mutexLock()/QK_mutexUnlock()
| | +-qk_ext.c - definition of QK_scheduleExt_()
| |
| +-lint\ - QK options for lint
| +-opt_qk.lnt - PC-lint options for linting QK
|
+-ports\ - Platform-specific QP ports
| +-80x86\ - Ports to the 80x86 processor
| | +-qk\ - Ports to the QK preemptive kernel
| | | +-tcpp101\ - Ports with the Turbo C++ 1.01 compiler
| | | +-l\ - Ports using the Large memory model
| | | +-dbg\ - Debug build
| | | | +-qf.lib – QF library
| | | | +-qep.lib – QEP library
| | | +-rel\ - Release build
| | | +-spy\ - Spy build (with software instrumentation)
| | | +-make.bat – batch script for building the QP libraries
| | | +-qep_port.h – QEP platform-dependent include file
| | | +-qf_port.h – QF platform-dependent include file
| | | +-qk_port.h – QK platform-dependent include file
| | | +-qs_port.h – QS platform-dependent include file
| | | +-qp_port.h – QP platform-dependent include file
| +-cortex-m3\ - Ports to the Cortex-M3 processor
| | +-qk\ - Ports to the QK preemptive kernel
| | | +-iar\ - Ports with the IAR compiler
| |
+-examples\ - Platform-specific QP examples
| +-80x88\ - Examples for the 80x86 processor
| | +-qk\ - Examples for the QK preemptive kernel
| | | +- . . .
| +-cortex-m3\ - Examples for the Cortex-M3 processor
| | +-qk\ - Examples for the QK preemptive kernel
| | | +- . . .
| +- . . .
头文件 qk.h
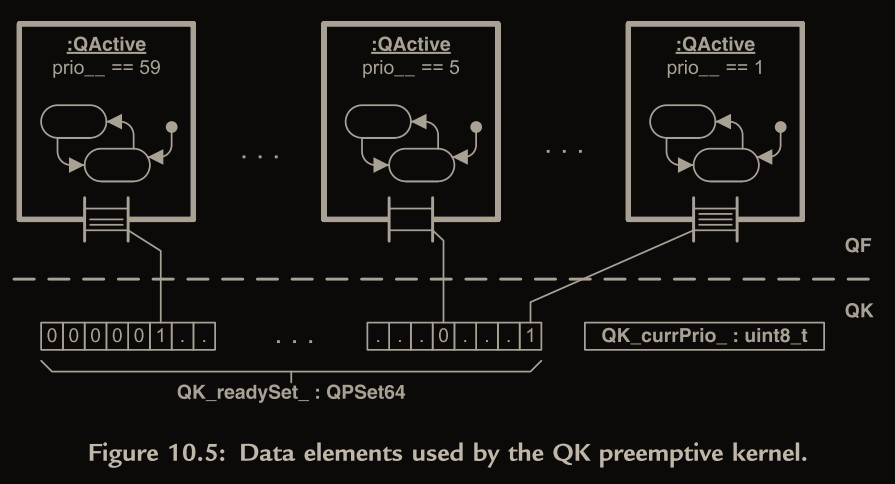
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
#ifndef qk_h
#define qk_h
// QK 内核使用原生 QF 事件队列
#include "qequeue.h" /* The QK kernel uses the native QF event queue */
// QK 内核使用原生 QF 内存池
#include "qmpool.h" /* The QK kernel uses the native QF memory pool */
// QK 内核使用原生 QF 优先级集合
#include "qpset.h" /* The QK kernel uses the native QF priority set */
/* public-scope objects */
// 优先级集合,相当于等待队列
extern QPSet64 volatile QK_readySet_; /**< QK ready-set */
// 当前正在运行的任务或中断的全局系统范围的优先级
extern uint8_t volatile QK_currPrio_; /**< current task/interrupt priority */
// 全局系统范围的中断嵌套层
extern uint8_t volatile QK_intNest_; /**< interrupt nesting level */
/***************************************************************************************/
/* QF configuration for QK */
#define QF_EQUEUE_TYPE QEQueue
#if defined(QK_TLS) || defined(QK_EXT_SAVE)
// 活动对象中的osObject变量的类型,比如Linux移植中使用pthread_cond_t用来表示条件变量控制线程休眠和唤醒,
// 这里QK里用来表示位掩码
#define QF_OS_OBJECT_TYPE uint8_t
// 活动对象里的thread变量的类型,标识线程,如Linux移植中使用pthread_t标识活动对象的线程id。
#define QF_THREAD_TYPE void *
#endif /* QK_TLS || QK_EXT_SAVE */
/* QK active object queue implementation...................................*/
// QK内核不阻塞,这个宏由QActive_get_调用,原用于事件队列为空时阻塞get,这里加了断言表示调用get时要保证事件队列非空,从而满足不阻塞要求
#define QACTIVE_EQUEUE_WAIT_(me_) \
Q_ASSERT((me_)->eQueue.frontEvt != (QEvent *)0)
// 当空的事件队列插入新事件时被调用,
#define QACTIVE_EQUEUE_SIGNAL_(me_) \
// 加入预备队列
QPSet64_insert(&QK_readySet_, (me_)->prio); \
// 如果发生在任务层,则调用调度器,否则发生在中断层,不调用调度器,因为任务不可能抢占中断
if (QK_intNest_ == (uint8_t)0) \
{ \
QK_SCHEDULE_(); \
} \
else \
((void)0)
// 移除事件导致事件队列为空时调用
#define QACTIVE_EQUEUE_ONEMPTY_(me_) \
QPSet64_remove(&QK_readySet_, (me_)->prio)
/* QK event pool operations...............................................*/
// 使用QF事件池
#define QF_EPOOL_TYPE_ QMPool
#define QF_EPOOL_INIT_(p_, poolSto_, poolSize_, evtSize_) \
QMPool_init(&(p_), poolSto_, poolSize_, evtSize_)
#define QF_EPOOL_EVENT_SIZE_(p_) ((p_).blockSize)
#define QF_EPOOL_GET_(p_, e_) ((e_) = (QEvent *)QMPool_get(&(p_)))
#define QF_EPOOL_PUT_(p_, e_) (QMPool_put(&(p_), (e_)))
void QK_init(void); /* QK initialization */
void QK_onIdle(void); /* QK idle callback */
char const Q_ROM *Q_ROM_VAR QK_getVersion(void);
// QK自己实现的互斥体
typedef uint8_t QMutex; /* QK priority-ceiling mutex */
// QK自己实现的互斥锁(用于临界区)
QMutex QK_mutexLock(uint8_t prioCeiling);
void QK_mutexUnlock(QMutex mutex);
/* QK scheduler and extended scheduler */
// 如果QF_INT_KEY_TYPE未定义
#ifndef QF_INT_KEY_TYPE
// 使用无条件中断上锁解锁
void QK_schedule_(void);
void QK_scheduleExt_(void); /* QK extended scheduler */
#define QK_SCHEDULE_() QK_schedule_()
#else
// 使用保存和恢复中断状态,参数需要一个保存当前中断状态的变量
void QK_schedule_(QF_INT_KEY_TYPE intLockKey);
void QK_scheduleExt_(QF_INT_KEY_TYPE intLockKey); /* extended scheduler */
#define QK_SCHEDULE_() QK_schedule_(intLockKey_)
#endif /* QF_INT_KEY_TYPE */
#endif /* qk_h */
中断的处理
可抢占型内核需要通过中断夺回控制权来执行调度,需要编写自己的 ISR 处理程序
QK 里的 ISR:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
void interrupt YourISR(void)
{/* typically entered with interrupts locked */
// 一般进ISR中断是上锁的,但有些CPU不上锁
// 清除中断源如有必要,防止中断丢失
Clear the interrupt source, if necessary
// 如果中断原来就是上锁的,不用上锁,否则要先上锁
// 修改QK_intNest_(需要临界区)让QK知道现在是在中断层,不允许任务抢占
++QK_intNest_; /* account for one more interrupt nesting level */
// 退出临界区
Unlock interrupts(depending on the interrupt policy used)
// 执行QF相关服务
Execute ISR body,including calling QF services, such as :
Q_NEW(), QActive_postFIFO(), QActive_postLIF(), QF_publish(), or QF_tick()
Lock interrupts, if they were unlocked in step(4)
// 给中断控制器发送EOI
Send the EOI instruction to the interrupt controller
// 通知QK结束了中断层,可以开始调度
--QK_intNest_; /* account for one less interrupt nesting level */
if (QK_intNest_ == (uint8_t)0)
{ /* coming back to the task level? */
QK_schedule_(); /* handle potential asynchronous preemption */
}
}
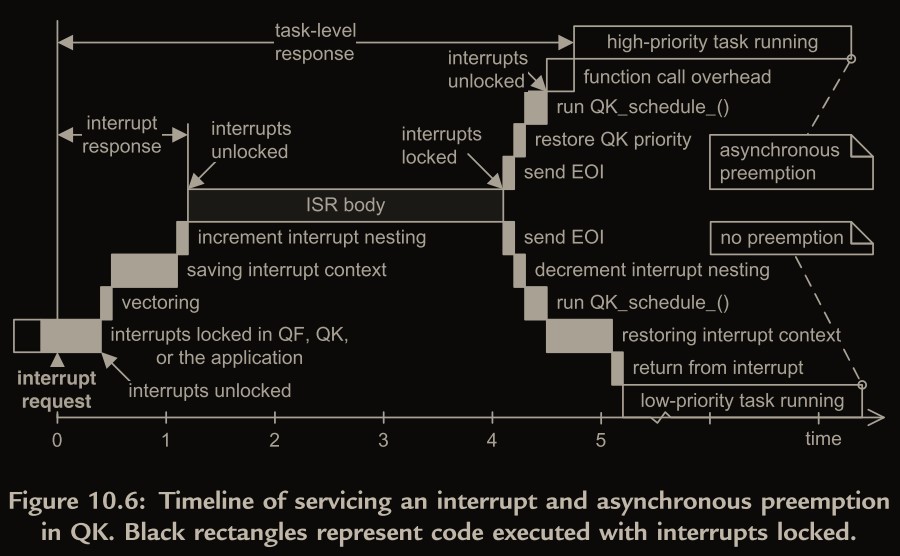
源文件 qk_sched.c ( QK 调度器)
qk_sched.c 源文件实现了 QK 调度器,它是 QK 内核的最重要的部分。
仅在 2 个时刻调用 QK 调度器:
- 当一个事件被发送给一个活动对象的一个事件队列(
同步抢占) - 在 ISR 处理的尾部(
异步抢占)。
QK 调度器是一个简单的常规 C 函数 QK_schedule_() ,它的工作是有效的找出预备运行的最高优先级的活动对象。为了执行这个工作, QK 调度器依靠 2 个数据元素:
预备运行的任务的集合
QK_readySet_QPSet64 类型,是个位图,每个 bit 表示一个活动对象,按照位排序 1-64 优先级
当前被服务的优先级
QK_currPrio_uint8_t 类型,存储当前优先级
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
#include "qk_pkg.h"
/* Public-scope objects -------------------------------------------------*/
// 优先级位图
QPSet64 volatile QK_readySet_; /* QK ready-set */
/* start with the QK scheduler locked */
// 当前优先级
uint8_t volatile QK_currPrio_ = (uint8_t)(QF_MAX_ACTIVE + 1);
// 嵌套级别,0表示任务层,大于等于1表示是非任务层
uint8_t volatile QK_intNest_; /* start with nesting level of 0 */
/*......................................................................*/
/* NOTE: the QK scheduler is entered and exited with interrupts LOCKED */
#ifndef QF_INT_KEY_TYPE
// 中断上锁策略选择
void QK_schedule_(void)
{
#else
void QK_schedule_(QF_INT_KEY_TYPE intLockKey_)
{
#endif
uint8_t p;
/* the QK scheduler must be called at task level only */
// 需要当前为任务层,如果是中断层不执行调度
Q_REQUIRE(QK_intNest_ == (uint8_t)0);
if (QPSet64_notEmpty(&QK_readySet_))
{
/* determine the priority of the highest-priority task ready to run */
// 从位图找优先级最高的已就绪对象
QPSet64_findMax(&QK_readySet_, p);
// 判断这个对象优先级是否超过当前优先级
// 注意此处如果任务执行中又发送事件给其他对象,导致再次调用本调度函数形成嵌套,通过这个判断可以终止嵌套,防止低优先级任务抢占
if (p > QK_currPrio_)
{/* do we have a preemption? */
// 保存优先级用于恢复
uint8_t pin = QK_currPrio_; /* save the initial priority */
QActive *a;
#ifdef QK_TLS /* thread-local storage used? */
uint8_t pprev = pin;
#endif
do
{
QEvent const *e;
a = QF_active_[p]; /* obtain the pointer to the AO */
// 更新当前优先级
QK_currPrio_ = p; /* this becomes the current task priority */
#ifdef QK_TLS /* thread-local storage used? */
if (p != pprev)
{ /* are we changing threads? */
QK_TLS(a); /* switch new thread-local storage */
pprev = p;
}
#endif
// 解锁中断,运行任务
QK_INT_UNLOCK_(); /* unlock the interrupts */
e = QActive_get_(a); /* get the next event for this AO */
QF_ACTIVE_DISPATCH_(&a->super, e); /* dispatch to the AO */
QF_gc(e); /* garbage collect the event, if necessary */
// 再次上锁
/* determine the highest-priority AO ready to run */
// 再次检测是否有高优先级任务等待执行,比如在上面的RTC步骤中发送事件给了其他任务(优先级比pin也就是调用本函数时的优先级高,在本函数返回前要把这些任务都处理完)
QK_INT_LOCK_();
if (QPSet64_notEmpty(&QK_readySet_))
{
QPSet64_findMax(&QK_readySet_, p);
}
else
{
p = (uint8_t)0;
}
} while (p > pin); /* is the new priority higher than initial? */
// 本次调度执行完成,假设内部有递归也递归执行完成,且所有优先级高于本函数调用时优先级的任务全部执行完成,本函数返回前恢复优先级
QK_currPrio_ = pin; /* restore the initial priority */
#ifdef QK_TLS /* thread-local storage used? */
if (pin != (uint8_t)0)
{ /* no extended context for idle loop */
a = QF_active_[pin];
QK_TLS(a); /* restore the original TLS */
}
#endif
}
}
}
源文件 qk.c ( QK 的启动和空闲循环)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
#include "qk_pkg.h"
#include "qassert.h"
Q_DEFINE_THIS_MODULE(qk)
/*......................................................................*/
void QF_init(void)
{
/* nothing to do for the QK preemptive kernel */
// 给个机会让QK初始化
QK_init(); /* might be defined in assembly */
}
/*......................................................................*/
void QF_stop(void)
{
QF_onCleanup(); /* cleanup callback */
/* nothing else to do for the QK preemptive kernel */
}
/*......................................................................*/
// 从main调用QF_run转让控制权
void QF_run(void)
{
// 实现QK内核的启动,可以和 vanilla 内核对比下
QK_INT_LOCK_KEY_
QK_INT_LOCK_();
// 优先级QK_currPrio_从初始的QF_MAX_ACTIVE+1变为0,开始空闲循环
QK_currPrio_ = (uint8_t)0; /* set the priority for the QK idle loop */
// 执行一次调度
QK_SCHEDULE_(); /* process all events produced so far */
QK_INT_UNLOCK_();
QF_onStartup(); /* startup callback */
for (;;)
{/* the QK idle loop */
// 给应用程序一个机会去把 CPU放入低功耗睡眠模式,或者执行其他任务(如软件追踪输出),通常在应用程序层 (BSP) 实现 QK_onIdle()函数
// 区别于vanilla 内核,QK内核进入idle前不用上锁(且不能上锁),因为可以实现抢占,只要有事件发生就会触发一次调度,不会导致事件未及时处理
QK_onIdle(); /* invoke the QK on-idle callback */
}
}
/*......................................................................*/
// 启动活动对象
void QActive_start(QActive *me, uint8_t prio,
QEvent const *qSto[], uint32_t qLen,
void *tls,
uint32_t flags,
QEvent const *ie)
{
Q_REQUIRE(((uint8_t)0 < prio) && (prio <= (uint8_t)QF_MAX_ACTIVE));
QEQueue_init(&me->eQueue, qSto, (QEQueueCtr)qLen);
me->prio = prio;
QF_add_(me); /* make QF aware of this active object */
#if defined(QK_TLS) || defined(QK_EXT_SAVE)
me->osObject = (uint8_t)flags; /* osObject contains the thread flags */
me->thread = tls; /* contains the pointer to the thread-local storage */
#else
Q_ASSERT((tls == (void *)0) && (flags == (uint32_t)0));
#endif
QF_ACTIVE_INIT_(&me->super, ie); /* execute initial transition */
}
/*......................................................................*/
void QActive_stop(QActive *me)
{
QF_remove_(me); /* remove this active object from the QF */
}
高级的 QK 特征
优先级天花板互斥体
活动对象应该只通过事件进行通讯,并且不共享任何资源。
你也许想选择共享某些选定的资源,就算要付出增加活动对象之间耦合的成本。如果你想这么做,你让自己背上了要处理存取这些资源(共享的内存或设备)的内部互锁的负担。可以用 QF 宏 QF_INT_LOCK() 和 QF_INT_UNLOCK() 实现的临界区机制
QK 支持优先级天花板互斥体(priority-ceiling mutex),在存取一个共享资源时,防止任务级的抢占。
1
2
3
4
5
6
7
8
9
10
11
void your_function(arguments) {
// QMutex类型的临时变量(uint8_t)
QMutex mutex;
...
// 上锁
mutex = QK_mutexLock(PRIO_CEILING);
// 临界区
You can safely access the shared resource here
QK_mutexUnlock(mutex);
...
}
QK 互斥体(<qp>\qpc\qk\source\qk_mutex.c):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
QMutex QK_mutexLock(uint8_t prioCeiling)
{
uint8_t mutex;
QK_INT_LOCK_KEY_
QK_INT_LOCK_();
// 临时保存当前优先级
mutex = QK_currPrio_; /* the original QK priority to return */
// 如果当前优先级小于天花板优先级(就是最高优先级,任务最大优先级加1,比所有任务都高)
if (QK_currPrio_ < prioCeiling)
{
// 当前优先级设为天花板优先级
QK_currPrio_ = prioCeiling; /* raise the QK priority */
}
QK_INT_UNLOCK_();
// 返回修改前的(调用本函数时)优先级,用于作为后面unlock时的参数
return mutex;
}
/*..............................................................*/
void QK_mutexUnlock(QMutex mutex)
{
QK_INT_LOCK_KEY_
QK_INT_LOCK_();
if (QK_currPrio_ > mutex)
{
// 恢复优先级
QK_currPrio_ = mutex; /* restore the saved priority */
QK_SCHEDULE_();
}
QK_INT_UNLOCK_();
}
其实类似于关中断让系统无法调度其他进程,只不过这个是应用层面的锁,不需要系统的关中断支持,这样就和操作系统和硬件解耦了。
本地线程存储
线程本地存储 (Thread-local storage,TLS) 是一种机制,变量通过它被分配,这样每个现存的线程有这个变量的一个实例。
该功能是为了解决多线程使用共用的全局变量时的冲突问题。
例如,ANSI C 标准里的 errno 功能。errno 是一个 int 类型的宏,当程序出现问题时,设置该宏为一个错误码,也就是 errno 的值为上一次错误的错误码。但这个宏是所有线程共享的,也就是线程无法分清这是哪个线程设置的。
解决方式是把 errno 定义为一个指针,指向了类型为 struct_reent 的结构,每个线程都包含了这个结构的对象(线程本地存储),上下文切换时让 errno 指针指向对应线程的这个对象。不仅解决了重入的问题,还扩展了 errno 的功能,因为struct_reent结构可以包含大量自定义的错误信息。
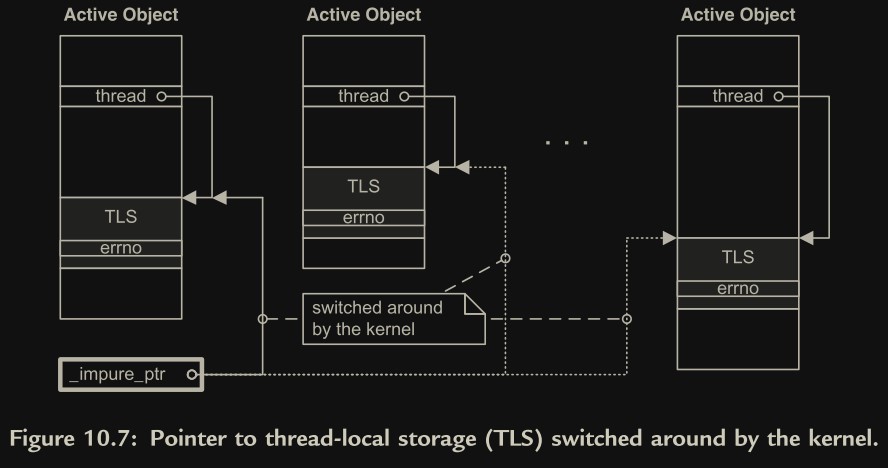
QK 通过提供一个上下文切换钩子 QK_TLS() 来支持 TLS 概念,在每一次,每一个不同任务的优先级被处理时,它被调用。
1
#define QK_TLS(act_) (_impure_ptr=(struct _reent *)(act_)->thread)
扩展的上下文切换(对协处理器的支持)
C 编译器为中断程序生成的上下文保存和恢复通常仅包含 CPU 核心寄存器,不包括各种协处理器的寄存器,比如围绕 CPU 核心的浮点协处理器,专门的 DSP 引擎,基带处理器,视频加速器或其他的协处理器。这些寄存器称为扩展上下文
两种情况不需要保存扩展上下文:
ISR和 QK空闲处理都不会使用协处理器。空闲循环不对应于某个活动对象,因此它不需要拥有 TLS 内存区域来保存扩展的上下文。(因此, 仅当某个任务抢占别的任务时才需要保存扩展上下文)同步抢占时一般不需要,因为同步抢占相当于一次函数调用,发送事件时产生调度,然后等高优先级的处理完通过函数返回,不会在存取某个协处理器时发生
这样就只有异步抢占时才需要保存扩展上下文,也就是在 QK_ISR_EXIT() 宏调用时。
1
2
3
4
5
6
7
8
#define QK_ISR_EXIT() do { \
Lock interrupts \
Send the EOI instruction to the interrupt controller \
--QK_intNest_; \
if (QK_intNest_ == 0) { \
QK_scheduleExt_(); \
} \
} while (0)
QK_scheduleExt_() 取代 QK_scheduler_() 用于保存扩展上下文。
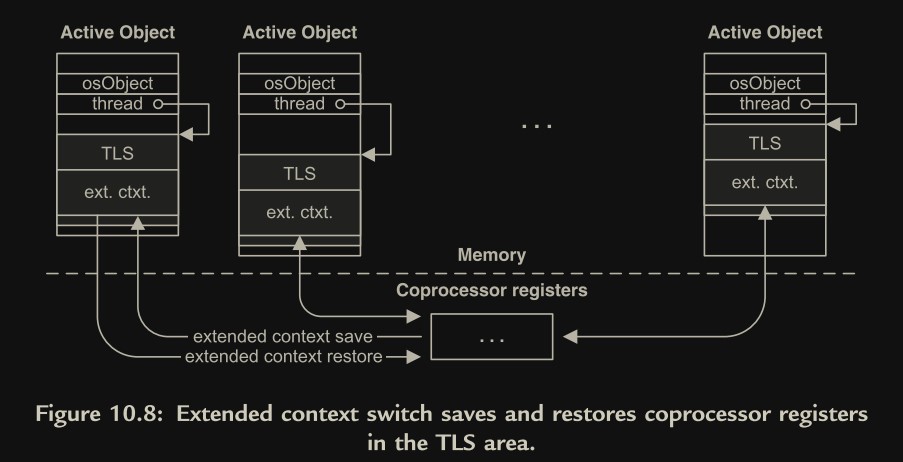
扩展上下文也包含在 TLS 区
QK 扩展调度器的实现( <qp>\qpc\qk\source\qk_ext.c):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
#ifndef QF_INT_KEY_TYPE
void QK_scheduleExt_(void)
{
#else
void QK_scheduleExt_(QF_INT_KEY_TYPE intLockKey_)
{
#endif
uint8_t p;
/* the QK scheduler must be called at task level only */
Q_REQUIRE(QK_intNest_ == (uint8_t)0);
if (QPSet64_notEmpty(&QK_readySet_))
{
/* determine the priority of the highest-priority task ready to run */
QPSet64_findMax(&QK_readySet_, p);
if (p > QK_currPrio_)
{ /* do we have a preemption? */
uint8_t pin = QK_currPrio_; /* save the initial priority */
QActive *a;
#ifdef QK_TLS /* thread-local storage used? */
uint8_t pprev = pin;
#endif
#ifdef QK_EXT_SAVE /* extended context-switch used? */
// 扩展上下文保存,pin为0表示空闲循环,不保存
if (pin != (uint8_t)0)
{ /*no extended context for the idle loop */
// 找到被抢占的活动对象的指针
a = QF_active_[pin]; /* the pointer to the preempted AO */
// 在调度前保存扩展上下文
// 即使不启用TLS也会保存
QK_EXT_SAVE(a); /* save the extended context */
}
#endif
do
{
QEvent const *e;
a = QF_active_[p]; /* obtain the pointer to the AO */
QK_currPrio_ = p; /* this becomes the current task priority */
#ifdef QK_TLS /* thread-local storage used? */
if (p != pprev)
{ /* are we changing threads? */
// 切换TLS指针
QK_TLS(a); /* switch new thread-local storage */
pprev = p;
}
#endif
QK_INT_UNLOCK_(); /* unlock the interrupts */
e = QActive_get_(a); /* get the next event for this AO */
QF_ACTIVE_DISPATCH_(&a->super, e); /* dispatch to the AO */
QF_gc(e); /* garbage collect the event, if necessary */
QK_INT_LOCK_();
/* determine the highest-priority AO ready to run */
if (QPSet64_notEmpty(&QK_readySet_))
{
QPSet64_findMax(&QK_readySet_, p);
}
else
{
p = (uint8_t)0;
}
} while (p > pin); /* is the new priority higher than initial? */
QK_currPrio_ = pin; /* restore the initial priority */
#if defined(QK_TLS) || defined(QK_EXT_RESTORE)
// 只有被抢占时才需要恢复,0表示还在空闲循环,没有活动对象运行,不用恢复
if (pin != (uint8_t)0)
{ /*no extended context for the idle loop */
a = QF_active_[pin]; /* the pointer to the preempted AO */
#ifdef QK_TLS /* thread-local storage used? */
// 切换TLS指针
QK_TLS(a); /* restore the original TLS */
#endif
#ifdef QK_EXT_RESTORE /* extended context-switch used? */
// 恢复扩展上下文
QK_EXT_RESTORE(a); /* restore the extended context */
#endif
}
#endif
}
}
}
移植 QK
QK 可以被移植到某个处理器和编译器,如果它们满足以下条件:
- 处理器支持一个
硬件堆栈,它可以容纳很多数据(最少 256 字节)。 - C 或 C++编译器可以生成
可重入代码。特别的,编译器必须可以在堆栈分配自动变量。 - 可以从 C/C++ 里上锁和解锁
中断。 - 系统提供了一个
时钟节拍中断(通常是 10 到 100Hz )。
后面省略,没有用
移植和配置 QF
QF 包含了一个被清楚定义的平台抽象层 PAL( platform abstraction layer ),它封装了所有平台相关的代码,清晰把它和平台无关的代码区分开
QP 平台抽象层
QP 事件驱动式平台的所有软件构件,比如 QEP 事件处理器和 QF 实时框架,包含了一个平台抽象层 PAL。这个 PAL 是一个 indirection 层,它隐藏了 QP 运行时硬件和软件环境的差异,因此 QP 源代码不需要被修改从而在一个不同的环境运行。相反,修改 QP 的所有必需的改变被限制在 PAL 内。
生成 QP 应用程序
你在使用的 QP 移植由 qf_port.h 头文件和 QF 库文件所在的目录分支决定。
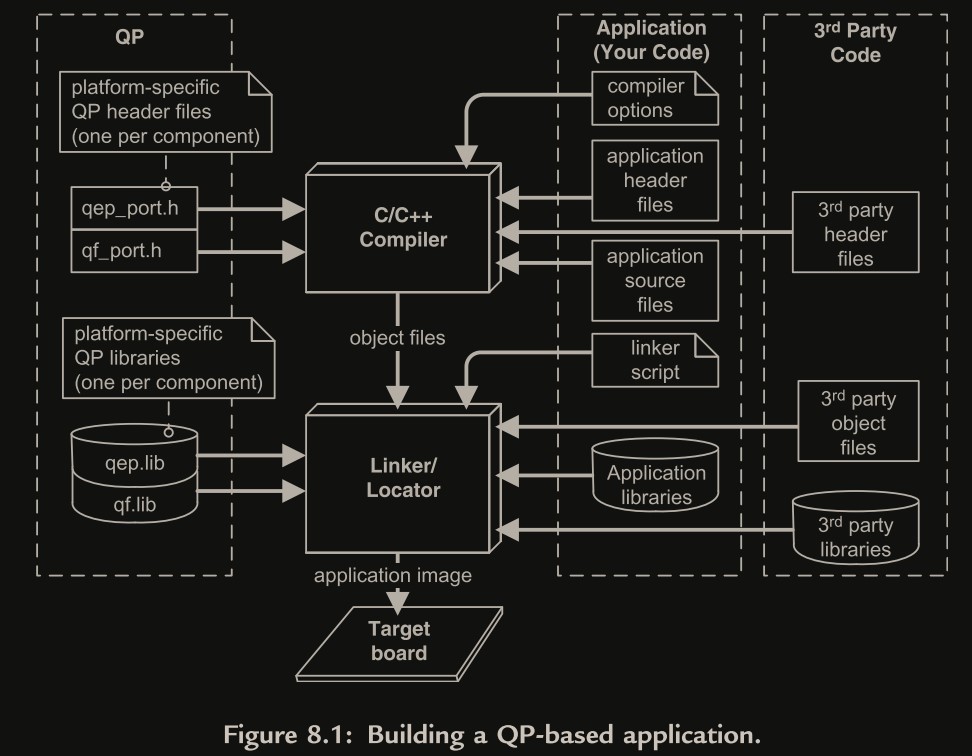
编译+链接,QP 库允许连接器在链接时消除任何没有被引用的 QP 代码
创建 QP 库
QF 示例(QEP 或 QK 可以参考这个):
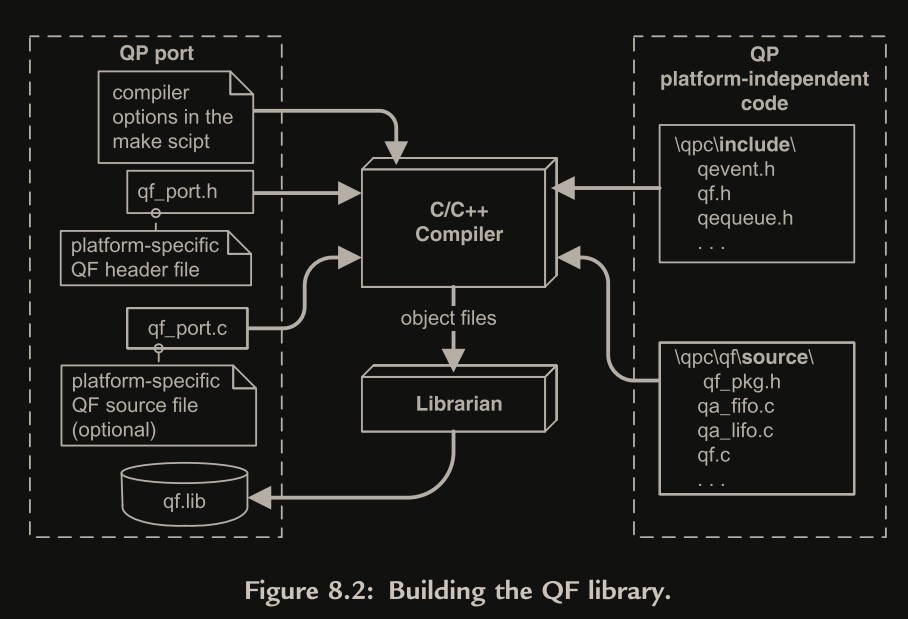
平台相关的 port 代码和平台无关的代码链接在一个 qf.lib 库中
目录和文件
PAL 使用一个一致的目录结构,允许你很容易的找到 QP 向某个给定 CPU,操作系统和编译器的移植。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
qpc\ - QP/C root directory (qpcpp\ for QP/C++),根目录可移动和改名,内部用的都是相对路径
|
+-ports\ - Platform-specific QP ports
| +-80x86\ - Ports to the 80x86 processor,CPU架构作为第一层,如80x86、ARM,在嵌入式领域,CPU架构比操作系统更重要
| | +-dos\ - Ports to DOS with the "vanilla" cooperative kernel,操作系统放在第二层
| | | +-tcpp101\ - Ports with the Turbo C++ 1.01 compiler,编译器在第三层,Turbo C+ +1.01、GCC等
| | | | +-l\ - Ports using the Large memory model,编译器可以为不同的 CPU模式生成代码。例如在 DOS下用于 80x86 的某个编译器,可以生成 small, compact ,large或huge内存模型。
| | | | | +-dbg\ - Debug build,QP 库文件可以使用不同的编译开关和优化选项来编译,存放开启调试编译选项的二进制文件
| | | | | | +-qf.lib - QF library,不同平台库文件命名规则也不同,Linux为libqf.a
| | | | | | +-qep.lib - QEP library
| | | | | +-rel\ - Release build,使用发行编译选项的二进制文件
| | | | | +-spy\ - Spy build (with software instrumentation),带qs追踪的二进制文件
| | | | | +-make.bat - batch script for building the QP libraries,makefile文件
| | | | | +-qep_port.h - QEP platform-dependent include file
| | | | | +-qf_port.h - QFplatform-dependent include file,平台相关头文件
| | | | | +-qs_port.h - QSplatform-dependent include file
| | | | | +-qp_port.h - QPplatform-dependent include file
| | |
| | +-qk\ - Ports to the QK preemptive kernel
| | | +-. . .
| | |
| | +-ucos2\ - Ports to the mC/OS-II RTOS
| | | +-tcpp101\ - Ports with the Turbo C++ 1.01 compiler
| | | | +-l\ - Ports using the Large memory model
| | | | | +-ucos2.86\ - mC/OS-II v2.86 object code and header files
| | | | | +-src\ - Port-specific source files
| | | | | | +-qf_port.c - QF port to mC/OS-II source file
| | | | | +-. . .
| | |
| | +-linux\ - Ports to the Linux operating system (POSIX)
| | +-gnu\ - Ports with the GNU compiler
| | | | +-src\ - Port-specific source files
| | | | | +-qf_port.c - QF port to Linux source file
| | +-. . .
| |
| +-cortex-m3\ - Ports to the Cortex-M3 processor,传统ARM和m3架构差别较大,独立设置
| | +-vanilla\ - Ports to the "vanilla" cooperative kernel
| | | +-iar\ - Ports with the IAR compiler
| | | | +-dbg\ - Debug build
| | | | +-rel\ - Release build
| | | | +-spy\ - Spy build (with software instrumentation)
| | | | +-make.bat - batch script for building QP libraries
| | | | +-qep_port.h - QEP platform-dependent include file
| | | | +-qf_port.h - QF platform-dependent include file
| | | | +-qs_port.h - QS platform-dependent include file
| | | | +-qp_port.h - QP platform-dependent include file
| | |...
| | +-qk\ - Ports to the QK preemptive kernel
| | +-iar\ - Ports with the IAR compiler
| +-. . . - Ports to other CPUs
|
+-examples\ - Platform-specific QP examples
| +-80x86\ - Examples for the 80x86 processor
| | +-dos\ - Examples for DOS with the "vanilla" cooperative kernel
| | +-tcpp101\ - Examples with the Turbo C++ 1.01 compiler
| | +-l\ - Examples using the Large memory model
| | +-dpp\ - DPP example,哲学家就餐问题,单独目录
| | | +-dbg\ - Debug build
| | | | +-dpp.exe - Debug executable
| | | +-rel\ - Release build
| | | | +-dpp.exe - Release executable
| | | +-spy\ - Spy build (with software instrumentation)
| | | | +-dpp.exe - Spy executable
| | | +-DPP-DBG.PRJ - Turbo C++ project to build the Debug version
| | +-game\ - "Fly ’n’ Shoot" game example
| | +-. . .
| +-cortex-m3\ - Examples for the Cortex-M3 processor
| | +-vanilla\ - Examples for the "vanilla" cooperative kernel
| | | +-iar\ - Examples with the IAR compiler
| | +-dpp\ - DPP example
| | +-game\ - "Fly ’n’ Shoot" game example
| | +-. . . - Other examples
| +-. . . - Examples for other CPUs
|
+-include\ - Platform independent QP header files,平台无关头文件
| +-qep.h - QEP platform-independent interface
| +-qf.h - QF platform-independent interface
| +-qk.h - QK platform-independent interface
| +-qs.h - QS platform-independent interface
| +-. . . - Other platform-independent QP header files
|
+-qep\ - QEP event processor,每个 QP 构件的平台独立的源代码在独立的目录里。
| +-source\ - QEP platform-independent source code (*.C files)
| | +-. . .
+-qf\ - QF real-time framework
| +-source\ - QF platform-independent source code (*.C files)
| | +-. . .
+-qk\ - QK preemptive kernel
| +-source\ - QK platform-independent source code (*.C files)
| | +-. . .
+-qs\ - QS software tracing
| +-source\ - QS platform-independent source code (*.C files)
| | +-. . .
头文件 qep_port.h
TODO:Q_ROM 和哈佛架构相关,需要了解下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
#ifndef qep_port_h
#define qep_port_h
/* special keyword used for ROM objects */
#define Q_ROM ????
/* specific pointer variant for accessing const objects in ROM */
#define Q_ROM_VAR ????
/* platform-specific access to constant data bytes in ROM */
#define Q_ROM_BYTE(rom_var_) ????
/* size of the QSignal data type */
#define Q_SIGNAL_SIZE ?
/* exact-width integer types */
// 使用编译器提供的标准stdint.h头文件或自定义编写来定义QP需要的扩展类型
#include <stdint.h> /* WG14/N843 C99 Standard, Section 7.18.1.1 */
typedef signed char int8_t; /* signed 8-bit integer */
typedef signed short int16_t; /* signed 16-bit integer */
typedef signed long int32_t; /* signed 32-bit integer */
typedef unsigned char uint8_t; /* unsigned 8-bit integer */
typedef unsigned short uint16_t; /* unsigned 16-bit integer */
typedef unsigned long uint32_t; /* unsigned 32-bit integer */
#include "qep.h" /* QEP platform-independent public interface */
#endif /* qep_port_h */
头文件 qf_port.h
头文件 qf_port.h 包含了 PAL 宏的定义, typedef,包含文件,和用于移植和配置 QF 实时框架的常数。 这是目前为止在整个 QP PAL 里最复杂和重要的文件。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
#ifndef qf_port_h
#define qf_port_h
/* Types of platform-specific QActive data members *************************/
// 可以使用RTOS/OS提供的消息队列,也可以用QF自带的原生队列用于事件队列
#define QF_EQUEUE_TYPE ????
// 使用QF原生队列时必需,QF_OS_OBJECT_TYPE 数据成员包含一个操作系统相关的原语,在队列为空时有效的阻塞原生 QF 事件队列。
#define QF_OS_OBJECT_TYPE ????
// 包含和活动对象联合的线程处理
#define QF_THREAD_TYPE ????
/* Base class for derivation of QActive ***********************************/
// 下面的宏用于自定义QActive的基类(默认时QHsm),一般不使用,命名结尾有下划线'_'作为标志
#define QF_ACTIVE_SUPER_ ????
#define QF_ACTIVE_CTOR_(me_, initial_) ????
#define QF_ACTIVE_INIT_(me_, e_) ????
#define QF_ACTIVE_DISPATCH_(me_, e_) ????
#define QF_ACTIVE_STATE_ ????
/* The maximum number of active objects in the application ******************/
// 活动对象最大数量,不超过63,8或更小时性能更高
#define QF_MAX_ACTIVE ????
/* Various object sizes within the QF framework ***************************/
// 都有默认值,空间大小和计数器大小
#define QF_EVENT_SIZ_SIZE 2
#define QF_EQUEUE_CTR_SIZE 1
// 内存池块大小,每块2字节
#define QF_MPOOL_SIZ_SIZE 2
// 内存池计数器大小,为2表示最大表示0xFFFF个块
#define QF_MPOOL_CTR_SIZE 2
#define QF_TIMEEVT_CTR_SIZE 2
/* QF critical section mechanism *****************************************/
// 临界区
// “保存和恢复中断状态”的策略和“无条件上锁和解锁中断”策略标志
#define QF_INT_KEY_TYPE ????
#define QF_INT_LOCK(key_) ????
#define QF_INT_UNLOCK(key_) ????
/* Include files used by this QF port *************************************/
// 内核头文件
#include <????.h> /* underlying OS/RTOS/Kernel interface */
#include "qep_port.h" /* QEP port */
#include "qequeue.h" /* native QF event-queue */
#include "qmpool.h" /* native QF memory-pool */
#include "qvanilla.h" /* native QF "vanilla" kernel */
#include "qf.h" /* platform-independent QF interface */
/**********************************************************************
* Interface used only inside QF, but not in applications
*/
/* Active object event queue operations ***********************************/
// 仅用于QF和使用原生事件队列时的宏,名字结尾有下划线,避免用于用户应用。
// 信号量耗尽阻塞
#define QACTIVE_EQUEUE_WAIT_(me_) ????
// 信号量补充解除阻塞
#define QACTIVE_EQUEUE_SIGNAL_(me_) ????
// 通知事件队列为空,比如vanilla需要在队列为空时将活动对象移出预备执行队列
#define QACTIVE_EQUEUE_ONEMPTY_(me_) ????
/* QF event pool operations **********************************************/
// 事件池
#define QF_EPOOL_TYPE_ ????
#define QF_EPOOL_INIT_(p_, poolSto_, poolSize_, evtSize_) ????
#define QF_EPOOL_EVENT_SIZE_(p_) ????
#define QF_EPOOL_GET_(p_, e_) ????
#define QF_EPOOL_PUT_(p_, e_) ????
/* Global objects required by the QF port ***********************************/
extern ???? ;
...
#endif /* qf_port_h */
源代码 qf_port.c
qf_port.c 源文件定义了 QF 移植和平台相关的代码。不是所有 QF 移植都需要这个文件。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
// 这个 qf_pkg.h 头文件包括 qf_port.h ,但是它还定义了一些内部宏和仅在 QF 构件内部共享的对象。
#include "qf_pkg.h"
// qf_port.h 源文件使用 QP 断言
#include "qassert.h"
// 见上面[C 和 C++ 里可定制的断言],用于指定模块名,用于日志打印时显示的名称
Q_DEFINE_THIS_MODULE(qf_port)
/* Global objects -------------------------------------------------------*/
...
/* Local objects---------------------------------------------------------*/
...
/*.....................................................................*/
char const Q_ROM *Q_ROM_VAR
QF_getPortVersion(void)
{
static const char Q_ROM Q_ROM_VAR version[] = "4.0.00";
return version;
}
/*.....................................................................*/
void QF_init(void)
{
...
}
/*.....................................................................*/
// 系统将控制权交给QF框架
void QF_run(void)
{
...
}
/*.....................................................................*/
void QF_stop(void)
{
...
}
/*.....................................................................*/
void QActive_start(QActive *me,
uint8_t prio, /* the unique priority */
QEvent const *qSto[], uint32_t qLen, /* event queue */
void *stkSto, uint32_t stkSize, /* per-task stack */
QEvent const *ie) /* the initialization event */
{
// 配置优先级
me->prio = prio; /* set the QF priority */
// 注册到QF
QF_add_(me); /* make QF aware of this active object */
// 触发最顶初始转换(相当于初始化)
QF_ACTIVE_INIT_(me, ie); /* execute the initial transition */
/* Initialize the event queue object ’me->eQueue’ using qSto and qLen */
// 初始化事件队列
/* Create and start the thread ’me->thread’ of the underlying RTOS */
// 启动线程
}
/*.....................................................................*/
void QActive_stop(QActive *me)
{
/* Cleanup me->eQueue or me->osObject */
// 执行清理工作,是否非栈中的内存
}
/*......................................................................*/
/* You need to define QActive_postFIFO(), QActive_postLIFO(), and
* QActive_get_() only if your QF port uses the queue facility from
* the underlying OS/RTOS.
*/
// 只有用了底层OS提供的队列工具时,才需要重写这三个函数,如果用的QF自带的事件队列则不需要
void QActive_postFIFO(QActive *me, QEvent const *e)
{
QF_INT_LOCK_KEY_
QF_INT_LOCK_();
if (e->dynamic_ != (uint8_t)0)
{ /* is it a dynamic event? */
++((QEvent *)e)->dynamic_; /* increment the reference counter */
}
QF_INT_UNLOCK_();
/* Post event pointer ’e’ to the message queue of the RTOS ’me->eQueue’
* using the FIFO policy without blocking. Also assert that the queue
* accepted the event pointer.
*/
}
/*......................................................................*/
void QActive_postLIFO(QActive *me, QEvent const *e)
{
QF_INT_LOCK_KEY_
QF_INT_LOCK_();
if (e->dynamic_ != (uint8_t)0)
{ /* is it a dynamic event? */
++((QEvent *)e)->dynamic_; /* increment the reference counter */
}
QF_INT_UNLOCK_();
/* Post event pointer ’e’ to the message queue of the RTOS ’me->eQueue’
* using the LIFO policy without blocking. Also assert that the queue
* accepted the event pointer.
*/
}
/*......................................................................*/
QEvent const *QActive_get_(QActive *me)
{
/* Get the next event from the active object queue ’me->eQueue’.
* Block indefinitely as long as the queue is empty. Assert no errors
* in the queue operation. Return the event pointer to the caller.
*/
}
和平台相关的 QF 回调函数
下面这几个函数是属于应用程序而不是 QF 框架的(意思就是就算这几个函数不定义,QF 也能正常运行,不是必需的)。它们不在 QF_port.c 中定义,在 QP 应用开发中有说明
1
void QF_onStartup(void)
在 QF 取得应用程序的控制之前这个回调函数被调用。 QF_onStartup()回调函数的主要意图是初始化并启动中断(TICK 时钟中断)
1
void QF_onCleanup(void)
在 QF 返回底层操作系统或 RTOS 前,调用 QF_onCleanup(void)。
1
void QF_onIdle(void) 或 void QF_onIdle(QF_INT_KEY_TYPE lockKey)
内建在 QF 里的合作式 vanilla 内核调用 QF_onIdle() 。这个回调函数的声明取决于在 QF 移植里采用的中断上锁策略。
1
void Q_onAssert(char const Q_ROM * const Q_ROM_VAR file, int line)
断言失败时的处理
系统时钟节拍(调用 QF_tick() )
需要定时调用 QF_tick() 来让 QF 正常工作。一般是在系统节拍 ISR 中调用。如果是 Linux 这种不允许修改 ISR 的,就要开个节拍器线程再加上睡眠和定时唤醒来模拟。
创建 QF 库
不是所有 QF 源文件都要包含。
qa_fifo.c,qa_lifo.c,qa_get_.c,如果自己定义了 QActive_postFIFO(),QActive_postLIFO(),和 QActive_get_()可以不包含,也就是仅在使用 QF 原生的队列时才包含
qvanilla.c,仅当你使用 vanilla 合作式内核时才需包含这个文件。
移植合作式 Vanilla 内核
把 vanilla 内核本身移植到目标 CPU 和编译器上
头文件 qep_port.h
展示了用于 80x86/DOS/Turbo C++ 1.01/Large 内存模型的 qep_port.h 头文件
用于 80x86/DOS/Turbo C++ 1.01/Large 内存模型的 qep_port.h 头文件:
1
2
3
4
5
6
7
8
9
10
11
12
#ifndef qep_port_h
#define qep_port_h
/* Exact-width integer types for DOS/Turbo C++ 1.01/Large memory model */
// 因为Turbo C++不是标准编译器,所以不带stdint.h,要自己指定扩展类型
typedef signed char int8_t;
typedef signed int int16_t;
typedef signed long int32_t;
typedef unsigned char uint8_t;
typedef unsigned int uint16_t;
typedef unsigned long uint32_t;
#include "qep.h" /* QEP platform-independent public interface */
#endif /* qep_port_h */
用于 Cortex-M3/IAR 的 qep_port.h 头文件:
1
2
3
4
5
6
#ifndef qep_port_h
#define qep_port_h
// IAR是标准的编译器,所以携带stdint.h
#include <stdint.h> /* C99-standard exact-width integer types */
#include "qep.h" /* QEP platform-independent public interface */
#endif /* qep_port_h */
头文件 qf_port.h
最重要的移植决定是选择上锁和解锁中断的策略。见保存和恢复中断状态
通常,你的第一安全选择应该是更先进的保存和恢复中断状态策略。然而,如果你发现在 ISR 内解锁中断是安全的,因为你的目标处理器可以在硬件对中断优先级排序,你可以使用简单和快捷的无条件中断解锁策略
用于 80x86/DOS/Turbo C++ 1.01/Large 内存模型的 qf_port.h 头文件:
1
2
3
4
5
6
7
8
9
10
11
12
13
#ifndef qf_port_h
#define qf_port_h
/* DOS critical section entry/exit */
/* QF_INT_KEY_TYPE not defined: "unconditional interrupt unlocking" policy */
// 80x86/DOS/Turbo C++ 1.01/Large内存模型内有基于优先级的中断控制器8259A,所以用无条件中断解锁策略
#define QF_INT_LOCK(dummy) disable()
#define QF_INT_UNLOCK(dummy) enable()
#include <dos.h> /* DOS API, including disable()/enable() prototypes */
#undef outportb /*don’t use the macro because it has a bug in Turbo C++ 1.01*/
#include "qep_port.h" /* QEP port */
#include "qvanilla.h" /* The "Vanilla" cooperative kernel */
#include "qf.h" /* QF platform-independent public interface */
#endif /* qf_port_h */
Cortex-M3/IAR 的 qf_port.h 头文件:
1
2
3
4
5
6
7
8
9
10
11
12
#ifndef qf_port_h
#define qf_port_h
/* QF critical section entry/exit */
/* QF_INT_KEY_TYPE not defined: "unconditional interrupt unlocking" policy */
// Cortex-M3 有一个标准的嵌套向量中断控制器 NVIC, 所以用无条件中断解锁策略
#define QF_INT_LOCK(dummy) __disable_interrupt()
#define QF_INT_UNLOCK(dummy) __enable_interrupt()
#include <intrinsics.h> /* IAR intrinsic functions */
#include "qep_port.h" /* QEP port */
#include "qvanilla.h" /* The "Vanilla" cooperative kernel */
#include "qf.h" /* QF platform-independent public interface */
#endif /* qf_port_h */
系统时钟节拍(QF_tick())
DOS 的系统时钟节拍 ISR ,它由连接到 IRQ0 的 8253/8254 时间计数器芯片的通道 0 触发
80x86/DOS/Turbo C++ 1.01/Large 内存模式下的系统时钟节拍 ISR:
1
2
3
4
5
6
7
8
9
void interrupt ISR_tmr0(void)
{ /* entered with interrupts LOCKED */
QF_INT_UNLOCK(dummy); /* unlock interrupts */
// 执行QF框架内的tick处理函数
QF_tick();
/* do some application-specific work ... */
QF_INT_LOCK(dummy); /* lock interrupts again */
outportb(0x20, 0x20); /* write EOI to the master 8259A PIC */
}
用于 Cortex-M3 的系统时钟节拍 ISR ,它由特别为这个目的而设计的,被称为 SysTick 的周期性定时器触发。进 ISR 是中断是解锁的,无需手动解锁。NVIC 中断控制器自动完成发送 EOI,不需要手动发送 EOI 指令
Cortex-M3/IAR 的 SysTick ISR:
1
2
3
4
5
void ISR_SysTick(void)
{ /* entered with interrupts UNLOCKED */
QF_tick();
/* do some application-specific work ... */
}
空闲处理(QF_onIdel())
只要 vanilla 内核探测到系统里所有活动对象时间队列为空,它就调用 QF_onIdle() 回调函数。
一般用于开启低功耗模式
80x86 没有低功耗模式,所以只解锁中断
用于 80x86/DOS 的 QF_onIdle() 回调函数:
1
2
3
4
5
void QF_onIdle(void)
{ /* entered with interrupts LOCKED */
QF_INT_UNLOCK(dummy); /* always unlock interrupts */
/* do some more application-specific work ... */
}
用于 Cortex-M3/IAR 的 QF_onIdle() 回调函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
void QF_onIdle(void)
{ /* entered with interrupts LOCKED */
#ifdef NDEBUG
/* Put the CPU and peripherals to the low-power mode.
* NOTE: You might need to customize the clock management for your
* application, by gating the clock to the selected peripherals.
* See the datasheet for your particular Cortex-M3 MCU.
*/
// 用 WFI 指令暂停 CPU(低功耗模式),需要通过中断唤醒
__asm("WFI"); /* Wait-For-Interrupt */
#endif
// 必须通过中断唤醒,所以这里一定要开中断
QF_INT_UNLOCK(dummy); /* always unlock interrupts */
/* optionally do some application-specific work ... */
}
QF 移植到 uc/os-II (常规 RTOS)
TODO:uc/os-II 不太了解,以后用到再说
QF 移植到 Linux (常规 POSIX 兼容的操作系统)
大型操作系统和 RTOS/裸机的区别是不允许关开中断,只能使用系统提供的 API(POSIX API、Win32 API)做有限的操作
头文件 qep_port.h
1
2
3
4
5
6
7
8
#ifndef qep_port_h
#define qep_port_h
/* 2-byte (64K) signal space */
// 增加信号数量,64K个
#define Q_SIGNAL_SIZE 2
#include <stdint.h> /* C99-standard exact-width integers */
#include "qep.h" /* QEP platform-independent public interface */
#endif /* qep_port_h */
头文件 qf_port.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
#ifndef qf_port_h
#define qf_port_h
/* Linux event queue and thread types */
// 使用QF原生QEQueue作为事件队列
#define QF_EQUEUE_TYPE QEQueue
// 使用POSIX中的条件变量作为事件队列为空时的阻塞标志
#define QF_OS_OBJECT_TYPE pthread_cond_t
// 每个活动对象一个线程
#define QF_THREAD_TYPE pthread_t
/* The maximum number of active objects in the application */
// 最大活动对象(线程)数
#define QF_MAX_ACTIVE 63
/* various QF object sizes configuration for this port */
// Linux一般需要32位的CPU,所以块大小和数量都定义成4字节
#define QF_EVENT_SIZ_SIZE 4
#define QF_EQUEUE_CTR_SIZE 4
#define QF_MPOOL_SIZ_SIZE 4
#define QF_MPOOL_CTR_SIZE 4
#define QF_TIMEEVT_CTR_SIZE 4
/* QF critical section entry/exit for Linux, see NOTE01 */
/* QF_INT_KEY_TYPE not defined, "unconditional interrupt locking" policy */
// 不定义QF_INT_KEY_TYPE,“无条件中断上锁和解锁”策略
// 使用pthread_mutex_lock创建临界区
#define QF_INT_LOCK(dummy) pthread_mutex_lock(&QF_pThreadMutex_)
#define QF_INT_UNLOCK(dummy) pthread_mutex_unlock(&QF_pThreadMutex_)
#include <pthread.h> /* POSIX-thread API */
#include "qep_port.h" /* QEP port */
#include "qequeue.h" /* Linux needs event-queue */
#include "qmpool.h" /* Linux needs memory-pool */
#include "qf.h" /* QF platform-independent public interface */
/************************************************************************
* interface used only inside QF, but not in applications
*/
/* OS-object implementation for Linux */
// 利用条件变量实现的阻塞和运行信号,总是用while包裹pthread_cond_wait,见另一篇文章
#define QACTIVE_EQUEUE_WAIT_(me_) \
while ((me_)->eQueue.frontEvt == (QEvent *)0) \
pthread_cond_wait(&(me_)->osObject, &QF_pThreadMutex_)
#define QACTIVE_EQUEUE_SIGNAL_(me_) \
pthread_cond_signal(&(me_)->osObject)
#define QACTIVE_EQUEUE_ONEMPTY_(me_) ((void)0)
/* native QF event pool operations */
#define QF_EPOOL_TYPE_ QMPool
#define QF_EPOOL_INIT_(p_, poolSto_, poolSize_, evtSize_) \
QMPool_init(&(p_), poolSto_, poolSize_, evtSize_)
#define QF_EPOOL_EVENT_SIZE_(p_) ((p_).blockSize)
#define QF_EPOOL_GET_(p_, e_) ((e_) = (QEvent *)QMPool_get(&(p_)))
#define QF_EPOOL_PUT_(p_, e_) (QMPool_put(&(p_), e_))
// 定义信号量
extern pthread_mutex_t QF_pThreadMutex_; /* mutex for QF critical section */
条件变量的定义见条件变量
qf_port.c 源代码
qf_port.c 源文件提供了在 QF 和 POSIX API 之间的“胶合代码”
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
#include "qf_pkg.h"
#include "qassert.h"
#include <sys/mman.h> /* for mlockall() */
#include <sys/select.h> /* for select() */
Q_DEFINE_THIS_MODULE(qf_port)
/* Global objects ------------------------------------------------------*/
// 全局互斥体
pthread_mutex_t QF_pThreadMutex_ = PTHREAD_MUTEX_INITIALIZER;
/* Local objects -------------------------------------------------------*/
static uint8_t l_running;
/*.....................................................................*/
void QF_init(void)
{
// 页上锁,防止交换到硬盘,桌面Linux不支持
/* lock memory so we’re never swapped out to disk */
/*mlockall(MCL_CURRENT | MCL_FUTURE); uncomment when supported */
}
/*.....................................................................*/
void QF_run(void)
{
struct sched_param sparam;
struct timeval timeout = {0}; /* timeout for select() */
// 应用程序初始化回调函数
QF_onStartup(); /* invoke startup callback */
/* try to maximize the priority of the ticker thread, see NOTE01 */
// 将当前线程设置成 SCHED_FIFO 调度策略和在这个策略里的最高优先级,需要root权限
// 高优先级是为了实时性,因为这个线程包含了tick处理操作
sparam.sched_priority = sched_get_priority_max(SCHED_FIFO);
if (pthread_setschedparam(pthread_self(), SCHED_FIFO, &sparam) == 0)
{
/* success, this application has sufficient privileges */
}
else
{
/* setting priority failed, probably due to insufficient privieges */
}
l_running = (uint8_t)1;
while (l_running)
{
// 在run线程里定期调用tick处理,而不是在tick ISR中,因为在Linux里没有权限访问中断
QF_tick(); /* process the time tick */
// select会修改timeout的值,需要每次重新赋值变量
timeout.tv_usec = 8000;
// 向上取整至一个tick,如果tick是10ms,这里的8ms会自动变10ms
// select使用空的I/O作为参数表示总是休眠(因为空的I/O不会触发唤醒信号),直到timeout到达
select(0, 0, 0, 0, &timeout); /* sleep for the full tick, NOTE05 */
}
// 应用程序清理回调函数
QF_onCleanup(); /* invoke cleanup callback */
pthread_mutex_destroy(&QF_pThreadMutex_);
}
/*......................................................................*/
void QF_stop(void)
{
// 可以在QF_run的循环过程中停止
l_running = (uint8_t)0; /* stop the loop in QF_run() */
}
/*......................................................................*/
// 线程函数,参数是活动对象
static void *thread_routine(void *arg)
{ /* the expected POSIX signature */
((QActive *)arg)->running = (uint8_t)1; /* allow the thread loop to run */
while (((QActive *)arg)->running)
{ /* QActive_stop() stopps the loop */
// 活动对象三个步骤,等待事件、执行事件处理、清理
QEvent const *e = QActive_get_((QActive *)arg); /*wait for the event */
QF_ACTIVE_DISPATCH_(&((QActive *)arg)->super, e); /* dispatch to SM */
QF_gc(e); /* check if the event is garbage, and collect it if so */
}
// 线程退出前从QF框架中取消注册该活动对象
QF_remove_((QActive *)arg); /* remove this object from any subscriptions */
return (void *)0; /* return success */
}
/*.....................................................................*/
void QActive_start(QActive *me, uint8_t prio,
QEvent const *qSto[], uint32_t qLen,
void *stkSto, uint32_t stkSize,
QEvent const *ie)
{
pthread_attr_t attr;
struct sched_param param;
// 在Linux中,活动对象线程的堆栈由系统分配(pthread_create()函数),无需外部提供
Q_REQUIRE(stkSto == (void *)0); /* p-threads allocate stack internally */
// 原生QF队列
QEQueue_init(&me->eQueue, qSto, (QEQueueCtr)qLen);
// 条件变量初始化,事件队列控制信号
pthread_cond_init(&me->osObject, 0);
// 设置优先级
me->prio = prio;
// 注册至QF
QF_add_(me); /* make QF aware of this active object */
// 初始化活动对象的状态机(就是状态机里的最顶初始转换),参数 ie 是一个指针,指向在活动对象状态机里用于最顶初始转换的初始事件。
QF_ACTIVE_INIT_(&me->super, ie); /* execute the initial transition */
/* SCHED_FIFO corresponds to real-time preemptive priority-based scheduler
* NOTE: This scheduling policy requires the superuser privileges
*/
pthread_attr_init(&attr);
// 配置线程调度策略,需要root权限
pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
/* see NOTE04 */
// 配置线程优先级,把系统中最大的n个优先级给这n个活动对象
param.sched_priority = prio + (sched_get_priority_max(SCHED_FIFO) - QF_MAX_ACTIVE - 3);
pthread_attr_setschedparam(&attr, ¶m);
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
// 开始创建线程
if (pthread_create(&me->thread, &attr, &thread_routine, me) != 0)
{
/* Creating the p-thread with the SCHED_FIFO policy failed.
* Most probably this application has no superuser privileges,
* so we just fall back to the default SCHED_OTHER policy
* and priority 0.
*/
// 如果权限不够,失败了,就要修改参数
pthread_attr_setschedpolicy(&attr, SCHED_OTHER);
param.sched_priority = 0;
pthread_attr_setschedparam(&attr, ¶m);
Q_ALLEGE(pthread_create(&me->thread, &attr, &thread_routine, me) == 0);
}
pthread_attr_destroy(&attr);
}
/*......................................................................*/
void QActive_stop(QActive *me)
{
// 用于中途停止活动对象
me->running = (uint8_t)0; /* stop the event loop in QActive_run() */
pthread_cond_destroy(&me->osObject); /* cleanup the condition variable */
}
开发 QP 应用程序
开发 QP 应用程序的准则
准则
- 活动对象应该仅通过某个
异步事件交换来相互作用,不应该共享内存或其他资源。 - 活动对象不应该
阻塞或者在 RTC 处理的中间忙等待事件。
启发式
- 事件驱动型编程,
非阻塞,快速返回 - 实现在活动对象之间的
松散耦合,避免资源共享 - 把较长的处理
分解成较短的步骤 - 画出
顺序图
哲学家就餐问题
第一步:需求
5 个哲学家,共用 5 个餐叉,吃面需要 2 个餐叉,吃完会思考,核心是防止死锁和饿死。
第二步:顺序图
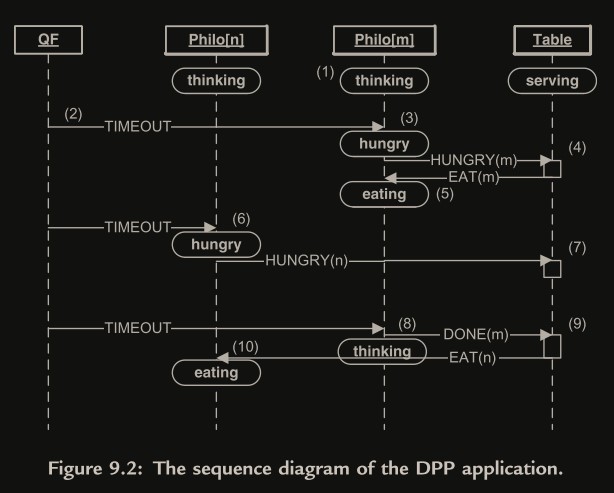
Table 对象管理餐叉,每个 Philo 对象管理一个哲学家
触发 QF 定时事件Philo[m]终止思考,开始饥饿,向 Table 发送事件 (HUNGRY(m)) 请求就餐许可(有足够的叉子)。Table 将就餐许可事件 (EAT(m)) 发送给对应对象。Philo[m]进入就餐状态直到下一个定时事件,发送完成事件 (DONE(m)) 归还叉子。
第三步:信号,事件和活动对象
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
#ifndef dpp_h
#define dpp_h
// 对哲学家就餐问题自定义的事件信号
enum DPPSignals
{
EAT_SIG = Q_USER_SIG, /* published by Table to let a philosopher eat */
DONE_SIG, /* published by Philosopher when done eating */
TERMINATE_SIG, /* published by BSP to terminate the application */
MAX_PUB_SIG, /* the last published signal */
// 这个信号是直接发送的
HUNGRY_SIG, /* posted directly from hungry Philosopher to Table */
MAX_SIG /* the last signal */
};
// 派生自QEvent的事件,增加了一个philoNum变量
typedef struct TableEvtTag
{
QEvent super; /* derives from QEvent */
uint8_t philoNum; /* Philosopher number */
} TableEvt;
enum
{
N_PHILO = 5
}; /* number of Philosophers */
// 构造函数,在main开始时调用
void Philo_ctor(void); /* ctor that instantiates all Philosophers */
void Table_ctor(void);
extern QActive *const AO_Philo[N_PHILO]; /* "opaque" pointers to Philo AOs */
extern QActive *const AO_Table; /* "opaque" pointer to Table AO */
#endif /* dpp_h */
第四步:状态机
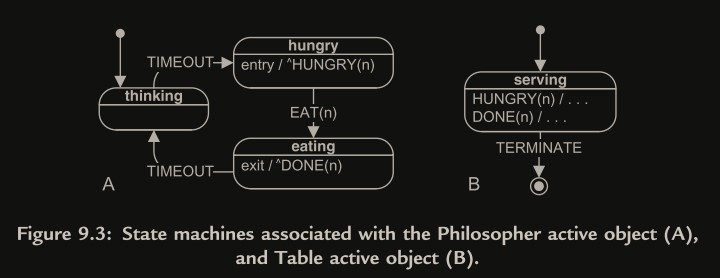
这里产生HUNGRY事件和DONE事件不是由定时事件触发而是进入退出动作时触发,更精确的反应了语义,提高后续的可维护性
准则:偏向使用
进入动作和退出动作,而不是转换动作。
哲学家和餐叉编号:
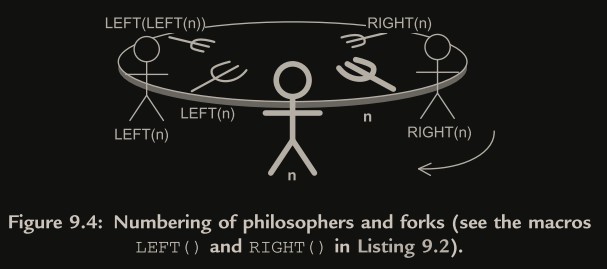
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
Q_DEFINE_THIS_FILE
/* Active object class -----------------------------------------------------*/
// 活动对象Table从QActive派生,增加了两个变量,管理叉子和饥饿度
typedef struct TableTag
{
QActive super; /* derives from QActive */
uint8_t fork[N_PHILO]; /* states of the forks */
uint8_t isHungry[N_PHILO]; /* remembers hungry philosophers */
} Table;
static QState Table_initial(Table *me, QEvent const *e); /* pseudostate */
static QState Table_serving(Table *me, QEvent const *e); /* state handler */
// 如上图,n顺时针递增,人和右叉为一组,标记为n,计算左边或右边组的序号
#define RIGHT(n_) ((uint8_t)(((n_) + (N_PHILO - 1)) % N_PHILO))
#define LEFT(n_) ((uint8_t)(((n_) + 1) % N_PHILO))
enum ForkState
{
FREE,
USED
};
/* Local objects ----------------------------------------------------------*/
// static让其他文件无法访问
static Table l_table; /* the single instance of the Table active object */
/* Global-scope objects ---------------------------------------------------*/
// 指针设为const不能更改,可以让编译器把该指针分配在ROM里(编译时就能分配)
QActive *const AO_Table = (QActive *)&l_table; /* "opaque" AO pointer */
/*........................................................................*/
// 构造函数,C需要手动调用,C++会自动调用
void Table_ctor(void)
{
uint8_t n;
Table *me = &l_table;
// 实例化超类,为super部分初始化
QActive_ctor(&me->super, (QStateHandler)&Table_initial);
for (n = 0; n < N_PHILO; ++n)
{
me->fork[n] = FREE;
me->isHungry[n] = 0;
}
}
/*.......................................................................*/
// 最顶初始转换
QState Table_initial(Table *me, QEvent const *e)
{
(void)e; /* avoid the compiler warning about unused parameter */
// 订阅信号
QActive_subscribe((QActive *)me, DONE_SIG);
QActive_subscribe((QActive *)me, TERMINATE_SIG);
/* signal HUNGRY_SIG is posted directly */
return Q_TRAN(&Table_serving);
}
/*.......................................................................*/
QState Table_serving(Table *me, QEvent const *e)
{
uint8_t n, m;
// Table相关事件,定义见上一节
TableEvt *pe;
switch (e->sig)
{
case HUNGRY_SIG:
{
// 人工延长单RTC处理的时间,方便进行压力测试
BSP_busyDelay();
// 提取事件参数
n = ((TableEvt const *)e)->philoNum;
/* phil ID must be in range and he must be not hungry */
Q_ASSERT((n < N_PHILO) && (!me->isHungry[n]));
// 屏幕打印
BSP_displyPhilStat(n, "hungry ");
m = LEFT(n);
if ((me->fork[m] == FREE) && (me->fork[n] == FREE))
{// 左右叉都空闲的情况
me->fork[m] = me->fork[n] = USED;
// 生成eat事件
pe = Q_NEW(TableEvt, EAT_SIG);
pe->philoNum = n;
QF_publish((QEvent *)pe);
BSP_displyPhilStat(n, "eating ");
}
else
{
me->isHungry[n] = 1;
}
return Q_HANDLED();
}
case DONE_SIG:
{
BSP_busyDelay();
n = ((TableEvt const *)e)->philoNum;
/* phil ID must be in range and he must be not hungry */
Q_ASSERT((n < N_PHILO) && (!me->isHungry[n]));
// 吃完开始思考
BSP_displyPhilStat(n, "thinking");
m = LEFT(n);
/* both forks of Phil [n] must be used */
Q_ASSERT((me->fork[n] == USED) && (me->fork[m] == USED));
// 归还叉子
me->fork[m] = me->fork[n] = FREE;
// 右边的人是否饥饿
m = RIGHT(n); /* check the right neighbor */
if (me->isHungry[m] && (me->fork[m] == FREE))
{
me->fork[n] = me->fork[m] = USED;
me->isHungry[m] = 0;
pe = Q_NEW(TableEvt, EAT_SIG);
pe->philoNum = m;
QF_publish((QEvent *)pe);
BSP_displyPhilStat(m, "eating ");
}
// 左边的左边的人是否饥饿
m = LEFT(n); /* check the left neighbor */
n = LEFT(m); /* left fork of the left neighbor */
if (me->isHungry[m] && (me->fork[n] == FREE))
{
me->fork[m] = me->fork[n] = USED;
me->isHungry[m] = 0;
pe = Q_NEW(TableEvt, EAT_SIG);
pe->philoNum = m;
QF_publish((QEvent *)pe);
BSP_displyPhilStat(m, "eating ");
}
return Q_HANDLED();
}
// 终止
case TERMINATE_SIG:
{
QF_stop();
return Q_HANDLED();
}
}
return Q_SUPER(&QHsm_top);
}
第五步:初始化并启动应用程序
注意点:
- 活动对象的相对优先级
- 预先分配的事件队列的尺寸
- 活动对象启动顺序
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
/* Local-scope objects ---------------------------------------------------*/
// 所有事件队列的内存缓存被静态分配
static QEvent const *l_tableQueueSto[N_PHILO];
static QEvent const *l_philoQueueSto[N_PHILO][N_PHILO];
// 用于订阅者列表的内存空间也被静态分配,这是个bitmap,之前提到过
static QSubscrList l_subscrSto[MAX_PUB_SIG];
// 使用"小尺寸"事件池
static union SmallEvent
{
void *min_size;// min_size无意义,这句是为了让SmallEvent至少比一个指针占用空间大
TableEvt te;
// 可以添加其他自定义事件
/* other event types to go into this pool */
} l_smlPoolSto[2 * N_PHILO]; /* storage for the small event pool */
/*.......................................................................*/
int main(int argc, char *argv[])
{
uint8_t n;
Philo_ctor(); /* instantiate all Philosopher active objects */
Table_ctor(); /* instantiate the Table active object */
BSP_init(argc, argv); /* initialize the Board Support Package */
QF_init(); /* initialize the framework and the underlying RT kernel */
// 订阅功能初始化
QF_psInit(l_subscrSto, Q_DIM(l_subscrSto)); /* init publish-subscribe */
// 用于动态事件的池,默认使用QF原生内存池管理,
// 这里用了BSS段空间(static变量)作为原始空间(有些嵌入式没有堆空间,这是标准做法)
QF_poolInit(l_smlPoolSto, sizeof(l_smlPoolSto), sizeof(l_smlPoolSto[0]));/* initialize event pools... */
// 先初始化哲学家对象,
for (n = 0; n < N_PHILO; ++n)
{ /* start the active objects... */
QActive_start(AO_Philo[n], (uint8_t)(n + 1),
l_philoQueueSto[n], Q_DIM(l_philoQueueSto[n]),
(void *)0, 0, /* no private stack */
(QEvent *)0);
}
// 后初始化table管理对象
QActive_start(AO_Table, (uint8_t)(N_PHILO + 1),
l_tableQueueSto, Q_DIM(l_tableQueueSto),
(void *)0, 0, /* no private stack */
(QEvent *)0);
QF_run(); /* run the QF application */
return 0;
}
第六步:优雅的结束应用程序
在嵌入式系统中不需要考虑,一般就是无限运行直到复位。
结束某个活动对象的线程的最干净的方法是通过调用QActive_stop(me)让它停止自己(自杀)
在不同的平台运行 DPP
在 DOS 上的 Vanilla 内核
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
...
/* Local-scope objects---------------------------------------------------*/
static void interrupt (*l_dosTmrISR)();
static void interrupt (*l_dosKbdISR)();
static uint32_t l_delay = 0UL; /* limit for the loop counter in busyDelay() */
#define TMR_VECTOR 0x08
#define KBD_VECTOR 0x09
/*......................................................................*/
// Turbo C++ 1.01编译器提供了一个扩展关健词 interrupt ,它允许你使用 C/C++ 编写ISR
void interrupt ISR_tmr(void)
{
// 80x86处理器在进ISR时自动关中断,不过可以在ISR内手动开中断
// 由8259A可编程中断控制器管理中断优先级
QF_INT_UNLOCK(dummy); /* unlock interrupts */
// QF_tick()内部会关中断,且使用了“无条件中断上锁和解锁”策略,
// 不支持中断嵌套,为了防止死锁,需要提前开中断,在临界区外调用QF_tick()
QF_tick(); /* call QF_tick() outside of critical section */
QF_INT_LOCK(dummy); /* lock interrupts again */
// 中断结束 end-of-interrupt(EOI)指令被发往主 8259A ,因此它结束这个中断级别的优先级。
outportb(0x20, 0x20); /* write EOI to the master 8259A PIC */
}
/*......................................................................*/
// 按键中断
void interrupt ISR_kbd(void)
{
uint8_t key;
uint8_t kcr;
QF_INT_UNLOCK(dummy); /* unlock interrupts */
key = inport(0x60); /*key scan code from the 8042 kbd controller */
kcr = inport(0x61); /* get keyboard control register */
outportb(0x61, (uint8_t)(kcr | 0x80)); /* toggle acknowledge bit high */
outportb(0x61, kcr); /* toggle acknowledge bit low */
if (key == (uint8_t)129)
{ /* ESC key pressed? */
static QEvent term = {TERMINATE_SIG, 0}; /* static event */
QF_publish(&term); /* publish to all interested AOs */
}
QF_INT_LOCK(dummy); /* lock interrupts again */
outportb(0x20, 0x20); /* write EOI to the master 8259A PIC */
}
/*.......................................................................*/
void QF_onStartup(void)
{
/* save the origingal DOS vectors ... */
// 保存原始中断向量,在最后清理时恢复
l_dosTmrISR = getvect(TMR_VECTOR);
l_dosKbdISR = getvect(KBD_VECTOR);
QF_INT_LOCK(dummy);
// 配置自定义的中断向量
setvect(TMR_VECTOR, &ISR_tmr);
setvect(KBD_VECTOR, &ISR_kbd);
QF_INT_UNLOCK(dummy);
}
/*.......................................................................*/
void QF_onCleanup(void)
{ /* restore the original DOS vectors ... */
QF_INT_LOCK(dummy);
// 恢复中断向量
setvect(TMR_VECTOR, l_dosTmrISR);
setvect(KBD_VECTOR, l_dosKbdISR);
QF_INT_UNLOCK(dummy);
_exit(0); /* exit to DOS */
}
/*.......................................................................*/
// 见[qvanilla.c 源文件](#qvanillac-源文件)
void QF_onIdle(void)
{ /* called with interrupts LOCKED */
QF_INT_UNLOCK(dummy); /* always unlock interrutps */
}
/*.......................................................................*/
void BSP_init(int argc, char *argv[])
{
// 读取参数
if (argc > 1)
{
// 忙等待时长
l_delay = atol(argv[1]); /* set the delay counter for busy delay */
}
printf("Dining Philosopher Problem example"
"\nQEP %s\nQF %s\n"
"Press ESC to quit...\n",
QEP_getVersion(),
QF_getVersion());
}
/*......................................................................*/
// 用于手动调用延长RTC执行时间,方便调试
void BSP_busyDelay(void)
{
uint32_t volatile i = l_delay;
// 忙等待
while (i-- > 0UL)
{ /* busy-wait loop */
}
}
/*......................................................................*/
// 打印执行信息,仅被活动对象 Table 调用
void BSP_displyPhilStat(uint8_t n, char const *stat)
{
printf("Philosopher %2d is %s\n", (int)n, stat);
}
/*......................................................................*/
void Q_onAssert(char const Q_ROM *const Q_ROM_VAR file, int line)
{ // 断言失败时终止
QF_INT_LOCK(dummy); /* cut-off all interrupts */
fprintf(stderr, "Assertion failed in %s, line %d", file, line);
QF_stop();
}
在 Cortex-M3 上的 Vanilla 内核

t(思考), e(就餐)和 h(饥饿)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
// 驱动库
#include "hw_ints.h"
.../* other Luminary Micro driver library include files */
/* Local-scope objects ---------------------------------------------------*/
static uint32_t l_delay = 0UL; /* limit for the loop counter in busyDelay() */
/*......................................................................*/
void ISR_SysTick(void)
{
// Cortex-M3 进入 ISR 时,中断是解锁的,这就有别于80x86
QF_tick(); /* process all armed time events */
/* add any application-specific clock-tick processing, as needed */
}
...
/*......................................................................*/
// 板的初始化
void
BSP_init(int argc, char *argv[])
{
(void)argc; /* unused: avoid the complier warning */
(void)argv; /* unused: avoid the compiler warning */
/* Set the clocking to run at 20MHz from the PLL. */
SysCtlClockSet(SYSCTL_SYSDIV_10 | SYSCTL_USE_PLL | SYSCTL_OSC_MAIN | SYSCTL_XTAL_6MHZ);
/* Enable the peripherals used by the application. */
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOC);
/* Configure the LED, push button, and UART GPIOs as required. */
GPIODirModeSet(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1,
GPIO_DIR_MODE_HW);
GPIODirModeSet(GPIO_PORTC_BASE, PUSH_BUTTON, GPIO_DIR_MODE_IN);
GPIODirModeSet(GPIO_PORTC_BASE, USER_LED, GPIO_DIR_MODE_OUT);
GPIOPinWrite(GPIO_PORTC_BASE, USER_LED, 0);
/* Initialize the OSRAM OLED display. */
// 初始化显示驱动
OSRAMInit(1);
OSRAMStringDraw("Dining Philos", 0, 0);
OSRAMStringDraw("0 ,1 ,2 ,3 ,4", 0, 1);
}
/*......................................................................*/
void BSP_displyPhilStat(uint8_t n, char const *stat)
{
char str[2];
str[0] = stat[0];
str[1] = '\0';
OSRAMStringDraw(str, (3 * 6 * n + 6), 1);
}
/*......................................................................*/
void BSP_busyDelay(void)
{
uint32_t volatile i = l_delay;
while (i-- > 0UL)
{ /* busy-wait loop */
}
}
/*......................................................................*/
void QF_onStartup(void)
{
/* Set up and enable the SysTick timer. It will be used as a reference
* for delay loops in the interrupt handlers. The SysTick timer period
* will be set up for BSP_TICKS_PER_SEC.
*/
// 设置节拍速率
SysTickPeriodSet(SysCtlClockGet() / BSP_TICKS_PER_SEC);
SysTickEnable();
// 配置节拍中断优先级,0xC0为倒数第二低的优先级
IntPrioritySet(FAULT_SYSTICK, 0xC0); /* set the priority of SysTick */
SysTickIntEnable(); /* Enable the SysTick interrupts */
QF_INT_UNLOCK(dummy); /* set the interrupt flag in PRIMASK */
}
/*......................................................................*/
// 没有操作系统,不需要清理,退出直接复位
void QF_onCleanup(void)
{
}
/*......................................................................*/
void QF_onIdle(void)
{ /* entered with interrupts LOCKED, see NOTE01 */
/* toggle the User LED on and then off, see NOTE02 */
GPIOPinWrite(GPIO_PORTC_BASE, USER_LED, USER_LED); /* User LED on */
GPIOPinWrite(GPIO_PORTC_BASE, USER_LED, 0); /* User LED off */
#ifdef NDEBUG
/* Put the CPU and peripherals to the low-power mode.
* you might need to customize the clock management for your application,
* see the datasheet for your particular Cortex-M3 MCU.
*/
// 低功耗模式
__asm("WFI"); /* Wait-For-Interrupt */
#endif
QF_INT_UNLOCK(dummy); /* always unlock the interrupts */
}
/*......................................................................*/
void Q_onAssert(char const Q_ROM *const Q_ROM_VAR file, int line)
{
(void)file; /* avoid compiler warning */
(void)line; /* avoid compiler warning */
QF_INT_LOCK(dummy); /* make sure that all interrupts are disabled */
// 实际使用要去掉这个循环
for (;;)
{ /* NOTE: replace the loop with reset for the final version */
}
}
/* error routine that is called if the Luminary library encounters an error */
void __error__(char *pcFilename, unsigned long ulLine)
{
Q_onAssert(pcFilename, ulLine);
}
uC/OS-II
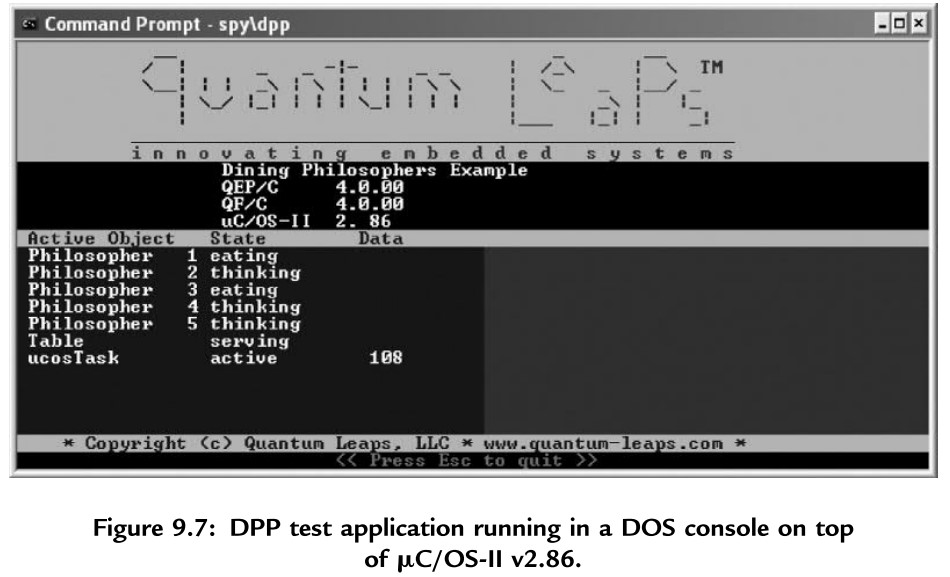
main.c:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
/* Local-scope objects ---------------------------------------------------*/
...
static OS_STK l_philoStk[N_PHILO][256]; /* stacks for the Philosophers */
static OS_STK l_tableStk[256]; /* stack for the Table */
static OS_STK l_ucosTaskStk[256]; /* stack for the ucosTask */
/*........................................................................*/
int main(int argc, char *argv[])
{
...
for (n = 0; n < N_PHILO; ++n)
{
// 需要为每个活动对象分配私有堆栈
QActive_start(AO_Philo[n], (uint8_t)(n + 1),
l_philoQueueSto[n], Q_DIM(l_philoQueueSto[n]),
l_philoStk[n], sizeof(l_philoStk[n]), (QEvent *)0);
}
QActive_start(AO_Table, (uint8_t)(N_PHILO + 1),
l_tableQueueSto, Q_DIM(l_tableQueueSto),
l_tableStk, sizeof(l_tableStk), (QEvent *)0);
/* create a uC/OS-II task to start interrupts and poll the keyboard */
// 比其他系统多加了个任务,见下面的bsp.c
OSTaskCreate(&ucosTask,
(void *)0, /* pdata */
&l_ucosTaskStk[Q_DIM(l_ucosTaskStk) - 1],
0); /* the highest uC/OS-II priority */
QF_run(); /* run the QF application */
return 0;
}
bsp.c:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
#include "video.h"
/*.......................................................................*/
void ucosTask(void *pdata)
{
(void)pdata; /* avoid the compiler warning about unused parameter */
QF_onStartup(); /* start interrupts including the clock tick, NOTE01 */
for (;;)
{
// for循环里要加阻塞转让控制权
OSTimeDly(OS_TICKS_PER_SEC / 10); /* sleep for 1/10 s */
if (kbhit())
{ /* poll for a new keypress */
uint8_t key = (uint8_t)getch();
// 检测是否按了 ESC 键
if (key == 0x1B)
{ /* is this the ESC key? */
// 发布静态的 TERMINATE 事件
QF_publish(Q_NEW(QEvent, TERMINATE_SIG));
}
else
{ /* other key pressed */
Video_printNumAt(30, 13 + N_PHILO, VIDEO_FGND_YELLOW, key);
}
}
}
}
/*.......................................................................*/
// 节拍中断,因为使用“保存和恢复中断状态”策略支持中断嵌套,进入ISR后不需要开中断
void OSTimeTickHook(void)
{
QF_tick();
/* add any application-specific clock-tick processing, as needed */
}
/*.......................................................................*/
// Idle进入低功耗模式
void OSTaskIdleHook(void){
/* put the MCU to sleep, if desired */
}
...
Linux
bsp.c:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
#include <sys/select.h>
...
Q_DEFINE_THIS_FILE
/* Local objects ---------------------------------------------------------*/
// Linux控制台默认配置不允许异步接收用户按键,需要修改控制台配置,这个变量备份了修改前的配置
static struct termios l_tsav; /* structure with saved terminal attributes */
static uint32_t l_delay; /* limit for the loop counter in busyDelay() */
/*.......................................................................*/
// 异步监控控制台输入的线程,按下ESC终止应用
static void *idleThread(void *me)
{ /* the expected P-Thread signature */
for (;;)
{
struct timeval timeout = {0}; /* timeout for select() */
fd_set con; /* FD set representing the console */
FD_ZERO(&con);
FD_SET(0, &con);
timeout.tv_usec = 8000;
/* sleep for the full tick or until a console input arrives */
// 使用select()作为阻塞机制
if (0 != select(1, &con, 0, 0, &timeout))
{ /* any descriptor set? */
char ch;
read(0, &ch, 1);
if (ch == '\33')
{ /* ESC pressed? */
// 按ESC发布退出事件
QF_publish(Q_NEW(QEvent, TERMINATE_SIG));
}
}
}
return (void *)0; /* return success */
}
/*.......................................................................*/
void BSP_init(int argc, char *argv[])
{
printf("Dining Philosopher Problem example"
"\nQEP %s\nQF %s\n"
"Press ESC to quit...\n",
QEP_getVersion(),
QF_getVersion());
if (argc > 1)
{
l_delay = atol(argv[1]); /* set the delay from the argument */
}
}
/*.......................................................................*/
void QF_onStartup(void)
{ /* startup callback */
struct termios tio; /* modified terminal attributes */
pthread_attr_t attr;
struct sched_param param;
pthread_t idle;
// 修改前保存终端属性
tcgetattr(0, &l_tsav); /* save the current terminal attributes */
tcgetattr(0, &tio); /* obtain the current terminal attributes */
tio.c_lflag &= ~(ICANON | ECHO); /* disable the canonical mode & echo */
// 关闭终端属性中的不允许异步输入模式
tcsetattr(0, TCSANOW, &tio); /* set the new attributes */
/* SCHED_FIFO corresponds to real-time preemptive priority-based scheduler
* NOTE: This scheduling policy requires the superuser priviledges
*/
pthread_attr_init(&attr);
// 将idle线程配置为SCHED_FIFO调度策略
pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
// 将idle线程优先级配置为最低
param.sched_priority = sched_get_priority_min(SCHED_FIFO);
pthread_attr_setschedparam(&attr, ¶m);
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
// 创建idle线程
if (pthread_create(&idle, &attr, &idleThread, 0) != 0)
{
/* Creating the p-thread with the SCHED_FIFO policy failed.
* Most probably this application has no superuser privileges,
* so we just fall back to the default SCHED_OTHER policy
* and priority 0.
*/
// 如果创建失败就尝试另外的配置重新创建
pthread_attr_setschedpolicy(&attr, SCHED_OTHER);
param.sched_priority = 0;
pthread_attr_setschedparam(&attr, ¶m);
Q_ALLEGE(pthread_create(&idle, &attr, &idleThread, 0) == 0);
}
pthread_attr_destroy(&attr);
}
/*.......................................................................*/
void QF_onCleanup(void)
{ /* cleanup callback */
printf("\nBye! Bye!\n");
tcsetattr(0, TCSANOW, &l_tsav); /* restore the saved terminal attributes */
QS_EXIT(); /* perform the QS cleanup */
}
/*.......................................................................*/
void BSP_displyPhilStat(uint8_t n, char const *stat)
{
printf("Philosopher %2d is %s\n", (int)n, stat);
}
/*.......................................................................*/
void BSP_busyDelay(void)
{
uint32_t volatile i = l_delay;
while (i-- > 0UL)
{
}
}
/*.......................................................................*/
void Q_onAssert(char const Q_ROM *const Q_ROM_VAR file, int line)
{
fprintf(stderr, "Assertion failed in %s, line %d", file, line);
QF_stop();
}
相关文章:select()用法
调整事件队列和事件池的大小
开发阶段使用超大的队列、池和堆栈,仅在产品开发的末期才开始缩小它们。
调整事件队列的大小
事件队列的要求:
1
平均事件产生速率 <P(t)> 不高于平均事件消耗速率 <C(t)>
一旦 P(t) 过大导致事件队列满,QP 会视其为异常,而不是阻塞生产者或丢弃事件
解决方法:
运行时评估:
- 运行程序一段时间并检查
nMin的值,评估事件队列大小是否合理
- 运行程序一段时间并检查
静态分析
事件队列的大小取决于活动对象的
优先级一般的,
优先级越高,必需的事件队列越短。因为一旦事件队列被填充,内核会尽快调度该活动对象线程运行处理事件队列大小取决于最长的
RTC步骤持续的时间处理越快,必需的事件队列越短。理想情况是,某个给定活动对象的所有 RTC 步骤都只需要相同的 CPU 周期来完成。
任何相关的事件生产都能增加队列的大小
有时候 ISR 或活动对象在一个 RTC 步骤内生产多个事件实例。应该避免短时间内产生较多事件
调整事件池的大小
取决于事件种类,和活动对象数量,事件实例的可重用性,事件池尺寸种类
系统集成
QF 允许你在软件的任何地方发送或发行事件,而不限于仅从活动对象。比如可以在设备驱动程序中发布事件。
设备应该被视为一个共享的资源,对它的存取限制到仅一个活动对象内,避免共享资源竞争导致的各种问题。可以用一个活动对象封装多个设备。
事件驱动型系统的软件追踪
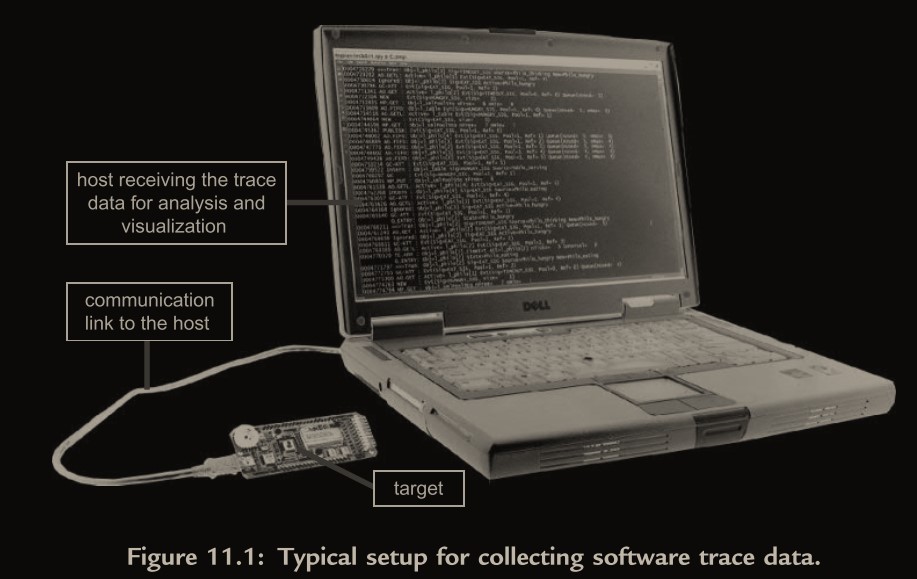
上图展示了软件追踪的一个典型设置
嵌入式目标系统在运行被监测的代码,它在目标系统的 RAM 缓存区记录追踪数据。追踪数据通过一个数据连接被从这个缓存区送给一个主机,它存储、显示和分析这些信息。这个配置意味着软件追踪总是需要 2 个构件:
QS 目标系统驻留构件
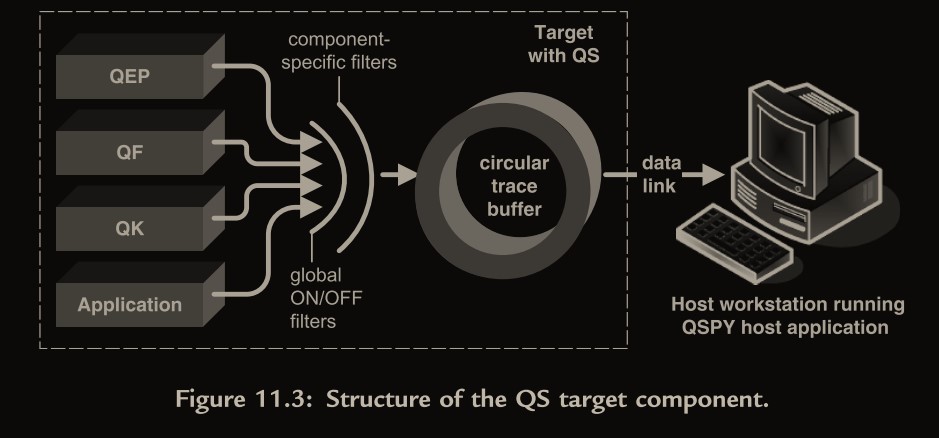
- 侵入性小 - 数据格式化工作被从目标系统里移到主机执行
- 数据记录和发送数据给主机是分隔的,例如在目标 CPU 的空闲循环处传输数据。减少了发送数据的开销
- 支持数据压缩,如数据字典
- 带级别过滤器
- 带可配精度时间戳
- 探测传输错误并重传机制(高级数据连接控制协议 [High Level Data Link Control, HLDLC])
- 轻量级传输 API
QS 源代码的组织
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
<qp>\qpc\ - QP/C root directory (<qp>\qpcpp for QP/C++)
|
+-include/ - QP platform-independent header files
| +-qs.h - QS platform-independent active interface
| +-qs_dummy.h - QS platform-independent inactive interface
|
+-qs/ - QS target component
| +-source/ - QS platform-independent source code (*.C files)
| | +-qs_pkg.h - internal, packet-scope interface for QS implementation
| | +-qs.c - internal ring buffer and formatted output functions
| | +-qs_.c - definition of basic unformatted output functions
| | +-qs_blk.c - definition of block-oriented interface QS_getBlock()
| | +-qs_byte.c - definition of byte-oriented interface QS_getByte()
| | +-qs_f32.c - definition of 32-bit floating point output QS_f32()
| | +-qs_f64.c - definition of 64-bit floating point output QS_f64()
| | +-qs_mem.c - definition of memory-block output
| | +-qs_str.c - definition of zero-terminated string output
|
+-ports\ - Platform-specific QP ports
| +- . . .
+-examples\ - Platform-specific QP examples
| +- . . .<qp>\qpc\ - QP/C root directory (<qp>\qpcpp for QP/C++)
|
+-include/ - QP platform-independent header files
| +-qs.h - QS platform-independent active interface
| +-qs_dummy.h - QS platform-independent inactive interface
|
+-qs/ - QS target component
| +-source/ - QS platform-independent source code (*.C files)
| | +-qs_pkg.h - internal, packet-scope interface for QS implementation
| | +-qs.c - internal ring buffer and formatted output functions
| | +-qs_.c - definition of basic unformatted output functions
| | +-qs_blk.c - definition of block-oriented interface QS_getBlock()
| | +-qs_byte.c - definition of byte-oriented interface QS_getByte()
| | +-qs_f32.c - definition of 32-bit floating point output QS_f32()
| | +-qs_f64.c - definition of 64-bit floating point output QS_f64()
| | +-qs_mem.c - definition of memory-block output
| | +-qs_str.c - definition of zero-terminated string output
|
+-ports\ - Platform-specific QP ports
| +- . . .
+-examples\ - Platform-specific QP examples
| +- . . .
QS 源文件通常在每个文件里只包含一个函数或一个数据结构。这种设计的目的在于把 QS 部署成一个精细粒度的库,你可以把它静态的和里的应用程序链接。精细粒度意味着 QS 库由许多小的松散耦合的模块(目标文件)组成,而不是由一个包含所有功能的单一模块组成。
QS 的平台无关头文件 qs.h 和 qs_dummy.h
qs.h- QS 功能的所有“活动”接口qs_dummy.h- QS 功能的所有“不活动”接口
qs.h:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
#ifndef qs_h
#define qs_h
#ifndef Q_SPY
#error "Q_SPY must be defined to include qs.h"
#endif /* Q_SPY */
// 枚举QS记录类型,相当于日志标记
enum QSpyRecords
{
/* QEP records */
QS_QEP_STATE_ENTRY, /**< a state was entered */
QS_QEP_STATE_EXIT, /**< a state was exited */
...
/* QF records */
QS_QF_ACTIVE_ADD, /**< an AO has been added to QF (started) */
QS_QF_ACTIVE_REMOVE, /**< an AO has been removed from QF (stopped) */
QS_QF_ACTIVE_SUBSCRIBE, /**< an AO subscribed to an event */
QS_QF_ACTIVE_UNSUBSCRIBE, /**< an AO unsubscribed to an event */
QS_QF_ACTIVE_POST_FIFO, /**< an event was posted (FIFO) directly to AO */
...
/* QK records */
QS_QK_MUTEX_LOCK, /**< the QK mutex was locked */
QS_QK_MUTEX_UNLOCK, /**< the QK mutex was unlocked */
QS_QK_SCHEDULE, /**< the QK scheduled a new task to execute */
...
/* Miscellaneous QS records */
QS_SIG_DICTIONARY, /**< signal dictionary entry */
QS_OBJ_DICTIONARY, /**< object dictionary entry */
QS_FUN_DICTIONARY, /**< function dictionary entry */
QS_ASSERT, /** assertion failed */
...
/* User records */
QS_USER /**< the first record available for user QS records */
// 从QS_USER开始可以自定义记录类型
};
...
/* Macros for adding QS instrumentation to the client code .................*/
//所有 QS 服务被定义为预处理器的宏。这样,即使软件追踪被禁止,你也可以把它们留在代码中。
#define QS_INIT(arg_) QS_onStartup(arg_)
#define QS_EXIT() QS_onCleanup()
// 全局 QS 过滤器,它把某个给定 QS 追踪记录打开或关闭。
#define QS_FILTER_ON(rec_) QS_filterOn(rec_)
#define QS_FILTER_OFF(rec_) QS_filterOff(rec_)
// 本地 QS 过滤器。这个过滤器允许你有选择的追踪那些特定的状态机对象。
#define QS_FILTER_SM_OBJ(obj_) (QS_smObj_ = (obj_))
#define QS_FILTER_AO_OBJ(obj_) (QS_aoObj_ = (obj_))
#define QS_FILTER_MP_OBJ(obj_) (QS_mpObj_ = (obj_))
#define QS_FILTER_EQ_OBJ(obj_) (QS_eqObj_ = (obj_))
#define QS_FILTER_TE_OBJ(obj_) (QS_teObj_ = (obj_))
#define QS_FILTER_AP_OBJ(obj_) (QS_apObj_ = (obj_))
/* Macros to generate user QS records (formatted data output) ..............*/
// 互斥锁,BEGIN上锁,END解锁,用于保护QS 追踪缓存
#define QS_BEGIN(rec_, obj_) ...
#define QS_END() ...
// 不上锁(比如在临界区内再调用就不需要关中断了)
#define QS_BEGIN_NOLOCK(rec_, obj_) ...
#define QS_END_NOLOCK() ...
...
#define QS_I8 (w_, d_) QS_u8((uint8_t)(((w_) << 4)) | QS_I8_T, (d_))
#define QS_U8 (w_, d_) QS_u8((uint8_t)(((w_) << 4)) | QS_U8_T, (d_))
#define QS_I16(w_, d_) QS_u16((uint8_t)(((w_) << 4)) | QS_I16_T, (d_))
#define QS_U16(w_, d_) QS_u16((uint8_t)(((w_) << 4)) | QS_U16_T, (d_))
#define QS_I32(w_, d_) QS_u32((uint8_t)(((w_) << 4)) | QS_I32_T, (d_))
#define QS_U32(w_, d_) QS_u32((uint8_t)(((w_) << 4)) | QS_U32_T, (d_))
#define QS_F32(w_, d_) QS_f32((uint8_t)(((w_) << 4)) | QS_F32_T, (d_))
#define QS_F64(w_, d_) QS_f64((uint8_t)(((w_) << 4)) | QS_F64_T, (d_))
#define QS_STR(str_) QS_str(str_)
#define QS_STR_ROM(str_) QS_str_ROM(str_)
#define QS_MEM(mem_, size_) QS_mem((mem_), (size_))
#if (QS_OBJ_PTR_SIZE == 1)
#define QS_OBJ(obj_) QS_u8(QS_OBJ_T, (uint8_t)(obj_))
#elif (QS_OBJ_PTR_SIZE == 2)
#define QS_OBJ(obj_) QS_u16(QS_OBJ_T, (uint16_t)(obj_))
#elif (QS_OBJ_PTR_SIZE == 4)
#define QS_OBJ(obj_) QS_u32(QS_OBJ_T, (uint32_t)(obj_))
#else
#define QS_OBJ(obj_) QS_u32(QS_OBJ_T, (uint32_t)(obj_))
#endif
#if (QS_FUN_PTR_SIZE == 1)
#define QS_FUN(fun_) QS_u8(QS_FUN_T, (uint8_t)(fun_))
#elif (QS_FUN_PTR_SIZE == 2)
...
#endif
#if (Q_SIGNAL_SIZE == 1)
#define QS_SIG(sig_, obj_) \
QS_u8(QS_SIG_T, (sig_)); \
QS_OBJ_(obj_)
#elif (Q_SIGNAL_SIZE == 2)
...
#endif
/* Dictionary records ......................................................*/
#define QS_OBJ_DICTIONARY(obj_) ...
#define QS_FUN_DICTIONARY(fun_) ...
#define QS_SIG_DICTIONARY(sig_, obj_) ...
...
/* Macros used only internally in the QP code ..............................*/
#define QS_BEGIN_(rec_, obj_) ...
#define QS_END_() ...
#define QS_BEGIN_NOLOCK_(rec_, obj_) ...
#define QS_END_NOLOCK_() ...
/* QS functions for managing the QS trace buffer ...........................*/
void
QS_initBuf(uint8_t sto[], uint32_t stoSize);
uint16_t QS_getByte(void); /* byte-oriented interface */
uint8_t const *QS_getBlock(uint16_t *pNbytes); /* block-oriented interface */
/* QS callback functions, typically implemented in the BSP .................*/
uint8_t QS_onStartup(void const *arg);
void QS_onCleanup(void);
void QS_onFlush(void);
QSTimeCtr QS_onGetTime(void);
#endif /* qs_h */
qs_dummy.h:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
#ifndef qs_dummy_h
#define qs_dummy_h
#ifdef Q_SPY
#error "Q_SPY must NOT be defined to include qs_dummy.h"
#endif
#define QS_INIT(arg_) ((uint8_t)1)
#define QS_EXIT() ((void)0)
#define QS_DUMP() ((void)0)
#define QS_FILTER_ON(rec_) ((void)0)
#define QS_FILTER_OFF(rec_) ((void)0)
#define QS_FILTER_SM_OBJ(obj_) ((void)0)
...
#define QS_GET_BYTE(pByte_) ((uint16_t)0xFFFF)
#define QS_GET_BLOCK(pSize_) ((uint8_t *)0)
#define QS_BEGIN(rec_, obj_) \
if (0) \
{
#define QS_END() }
#define QS_BEGIN_NOLOCK(rec_, obj_) QS_BEGIN(rec_, obj_)
#define QS_END_NOLOCK() QS_END()
#define QS_I8(width_, data_) ((void)0)
#define QS_U8(width_, data_) ((void)0)
...
#define QS_SIG(sig_, obj_) ((void)0)
#define QS_OBJ(obj_) ((void)0)
#define QS_FUN(fun_) ((void)0)
#define QS_SIG_DICTIONARY(sig_, obj_) ((void)0)
#define QS_OBJ_DICTIONARY(obj_) ((void)0)
#define QS_FUN_DICTIONARY(fun_) ((void)0)
#define QS_FLUSH() ((void)0)
...
#endif
QS 的临界区
QS 目标构件必须保护追踪缓存的内部完整性,它在并发运行的任务和中断之间被共享,所以需要被视为临界区
当 QS 探测 QF 临界区的宏 QF_INT_LOCK() , QF_INT_UNLOCK() 被定义时, QS 使用了这个定义作为它自己的临界区。
然而,当你在没有 QF 实时框架的情况下使用 QS 时,你需要在qs_port.h头文件里定义 QS 的平台相关的中断上锁 / 解锁策略
QS_BEGIN 和 QS_END()就是利用的
qs_port.h里定义的锁宏
自定义的锁qs_port.h:
1
2
3
#define QS_INT_KEY_TYPE . . .
#define QS_INT_LOCK(key_) . . .
#define QS_INT_UNLOCK(key_) . . .
QS 记录的一般结构
QS 在分离的被称为 QS“追踪记录” 的小块里记录追踪数据。
1
2
3
4
5
QS_BEGIN_xxx(record_type) /* trace record begin */
QS_yyy(data); /* QS data element */
QS_zzz(data); /* QS data element */
. . . /* QS data element */
QS_END_xxx() /* trace record end */
QS_BEGIN/QS_END(): 在记录的开始处上锁中断,在记录的结尾解锁中断。QS_BEGIN_NOLOCK()/QS_END_NOLOCK(): 用来创建应用程序相关的记录而不需进入临界区,它们仅能被用于某个临界区内部。
TODO:NOLOCK 有什么意义
QS 的过滤器
全局开/关过滤器
预定义的类型就是qs.h中的QSpyRecords枚举型,通过过滤器启用/禁用对应类型的日志记录
全局开 / 关过滤器使用一个位掩码数据QS_glbFilter_[]而高效的实现,这个数组的每一位代表一个追踪记录。当前 QS_glbFilter_[]包含 32 字节,总共 32×8 位可以代表 256 个不同的追踪记录。其中大约四分之一已经被用于预定义的 QP 追踪记录。剩下四分之三可以用于应用程序。
1
2
3
#define QS_BEGIN(rec_, obj_) \
if (((QS_glbFilter_[(uint8_t)(rec_) >> 3U] \
& (1U << ((uint8_t)(rec_) & 7U))) != 0) . . .\
rec_表示记录类型枚举 id,从 0 到 255,右移三位表示整除 8,因为最后三位被右移掉了,相当于把余数抹除了。这样QS_glbFilter_[]就能定位到该 id 对应的字节,如 255 对应第 32 个字节,46 对应第 5 个字节。然后再以上一步余数(和 7 进行与操作)为mask找到对应的位,代码中就是将 1 左移余数值生成一个字节 8 位里的某个 mask。如 46 余数是 6,1 左移 6 位,mask 就是 0x40,找到第 5 个字节中的 0x40 mask 对应的位
上述表达式中需要重复计算的部分可以作为编译时常数值。 如
(QS_glbFilter_[5] & 0x40) != 0)
这里将
QS_glbFilter_定义为单字节数组而不是多字节数组是为了兼容性。
- 宏
QS_FILTER_ON(rec_): 打开和记录 rec_ 对应的位 - 宏
QS_FILTER_OFF(rec_): 关闭和记录 rec_ 相对应的位
本地过滤器
以对象为单位管理过滤器。如只开启对某个活动对象的打印,关闭其他的
对象类型有:状态机、活动对象、内存池、事件队列、时间事件、一般的应用程序对象
| 本地过滤器 | 对象类型 | 例子 | 适用的 QS 记录 |
|---|---|---|---|
| QS_FILTER_SM_OBJ() | 状态机 | QS_FILTER_SM_OBJ( &l_qhsmTst); | QS_QEP_STATE_EMPTY, QS_QEP_STATE_ENTRY, QS_QEP_STATE_EXIT, QS_QEP_STATE_INIT, QS_QEP_INIT_TRAN, QS_QEP_INTERN_TRAN, QS_QEP_TRAN, QS_QEP_IGNORED |
| QS_FILTER_AO_OBJ() | 活动对象 t | QS_FILTER_AO_OBJ( &l_philo[3]); | QS_QF_ACTIVE_ADD, QS_QF_ACTIVE_REMOVE, QS_QF_ACTIVE_SUBSCRIBE, QS_QF_ACTIVE_UNSUBSCRIBE, QS_QF_ACTIVE_POST_FIFO, QS_QF_ACTIVE_POST_LIFO, QS_QF_ACTIVE_GET, QS_QF_ACTIVE_GET_LAST |
| QS_FILTER_MP_OBJ() ( 见注释 1) | 内存池 | QS_FILTER_MP_OBJ( l_regPoolSto); | QS_QF_MPOOL_INIT, QS_QF_MPOOL_GET QS_QF_MPOOL_PUT |
| QS_FILTER_EQ_OBJ() ( 见注释 2) | 事件队列 | QS_FILTER_EQ_OBJ( l_philQueueSto[3]); | QS_QF_EQUEUE_INIT, QS_QF_EQUEUE_POST_FIFO, QS_QF_EQUEUE_POST_LIFO, QS_QF_EQUEUE_GET, QS_QF_EQUEUE_GET_LAST |
| QS_FILTER_TE_OBJ() | 时间事件 | QS_FILTER_TE_OBJ( &l_philo[3].timeEvt); | QS_QF_TICK, QS_QF_TIMEEVT_ARM, QS_QF_TIMEEVT_AUTO_DISARM, QS_QF_TIMEEVT_DISARM_ATTEMPT, QS_QF_TIMEEVT_DISARM, QS_QF_TIMEEVT_REARM, QS_QF_TIMEEVT_POST, QS_QF_TIMEEVT_PUBLISH |
| QS_FILTER_AP_OBJ() | 一般的应用程序对象 | QS_FILTER_AP_OBJ( &myAppObject); | 以 QS_USER 开始的应用程序相关的记录 |
QS 数据协议
类似 HDLC 协议
QS 协议被特别设计用来简化在目标系统里的数据管理的开销,同时允许探测到任何由于追踪缓存不足造成的数据丢失。这个协议不但可以探测到在数据和其他错误之间的缺陷,而且允许在任何错误后立即重新同步,把数据丢失减到最小。
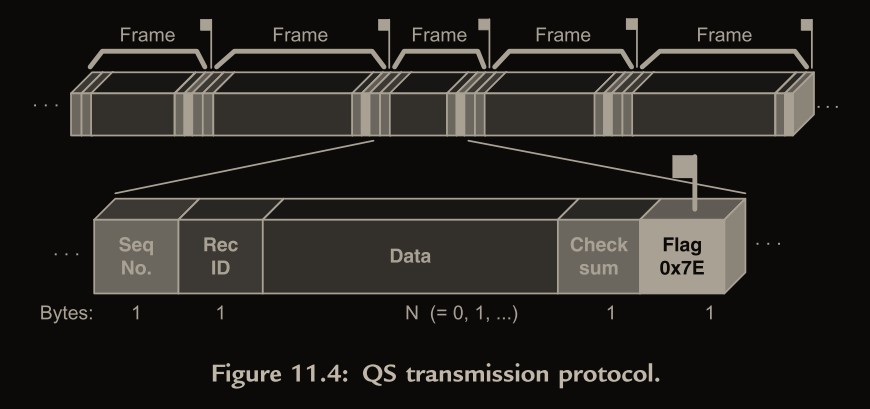
帧序号+记录类型 ID+数据域+校验码+帧尾标记
透明
就是对帧内出现的帧尾标记字节(0x7E)做转义
使用 0x7D 做转义前导符,对 0x7E 做转义,当然 0x7D 本身也要转义,方法为对要转义的字符和 0x20 异或
一个例子也许可以更清楚的说明这点。假设以下的追踪记录需要被插入追踪缓存(透明字节用粗 体字显示):
1
Record ID = 0x7D, Record Data = 0x7D 0x08 0x01
假设当前的帧顺序号码是 0x7E,校验和通过计算下列字节而得到:
1
Checksum == (uint8_t)(~(0x7E + 0x7D + 0x7D + 0x08 + 0x01)) == 0x7E
实际被插入到 QS 追踪缓存的帧如下:
1
0x7D 0x5E 0x7D 0x5D 0x7D 0x5D 0x08 0x01 0x7D 0x5E 0x7E
大小端
QS 传输协议规定了数据是小端( little-endian )
高位高地址,低位低地址,优先传输低位
QS 追踪缓存区
追踪缓存区内保存的就是HDLC帧
特点:
- 第一,在追踪缓存使用 HDLC 格式的数据,允许把向追踪缓存插入数据和从指针缓存已走数据解除耦合。可以按个数丢弃,无需考虑边界(自动检测边界)
- 第二,在缓存里使用格式化的数据能够使用“最后的是最好的”追踪策略。因为
校验码可以检测覆盖导致的错误,自动丢弃被覆盖的数据
初始化 QS 追踪缓存区 QS_initBuf()
需要为 QS 追踪缓存分配静态存储,当日志数据量大时,缓存也要大,防止绕尾破坏数据(虽然该错误能被检测和处理,但数据还是丢了)
1
2
3
4
5
6
7
8
9
10
11
12
#ifdef Q_SPY /* define QS callbacks */
uint8_t QS_onStartup(void const *arg)
{
static uint8_t qsBuf[2 * 1024]; /* buffer for Quantum Spy */
QS_initBuf(qsBuf, sizeof(qsBuf));
// Initialize the QS data link
...
return success; /* return 1 for success and 0 for failure */
}
#endif
面向字节的接口: QS_getByte()
可以在任何时候从缓存移走一个字节
函数 QS_getByte() 不上锁中断,也不是可重入的。也就是用的时候要应用自己加锁
TODO:为什么要这么设计,函数体内关中断不行吗
1
2
3
4
5
6
7
8
9
10
11
QF_INT_LOCK(igonre);
while ((fifo != 0) && ((b = QS_getByte()) != QS_EOD)) /* get the next byte */
{
QF_INT_UNLOCK(igonre);
// 从缓存读取(移走)一个字节放入TX发送缓存
outportb(l_base + 0, (uint8_t)b); /* insert byte into TX FIFO */
--fifo;
QF_INT_LOCK(igonre);
}
QF_INT_UNLOCK(igonre);
面向块的接口: QS_getBlock()
获取一个块,fifo 入参表示希望获取的长度,出参表示实际获得长度。函数返回块起始指针
需要应用加锁
返回长度小于输入长度时表示缓存读尽或还有回绕,再读一次,如果长度是 0 表示缓存读尽
1
2
3
4
5
6
7
8
uint16_t fifo = UART_16550_TXFIFO_DEPTH; /* 16550 Tx FIFO depth */
uint8_t const *block;
QF_INT_LOCK(dummy);
block = QS_getBlock(&fifo); /* try to get next block to transmit */
QF_INT_UNLOCK(dummy);
while (fifo-- != 0) { /* any bytes in the block? */
outportb(l_uart_base + 0, *block++);
}
字典追踪记录
当你编译并把应用程序映像装入目标系统后,关于对象名,函数名和信号名的符号信息被从代码中剥离。
QS 提供了专门的追踪记录,特别被设计用来在追踪记录本身包含目标代码的符号信息。用于 QSPY 主机应用程序的包含在追踪记录里的字典记录,非常类似传统的单步调试器使用的嵌入在目标文件里的符号信息。
QS 支持 3 类字典追踪记录:对象字典,函数字典和信号字典。
对象字典
用宏
QS_OBJ_DICTONARY()来生成对象字典,它把对象在内存的地址和它的符号名联合起来。1 2
// 通过活动对象0的内存地址获取对象的名字 QS_OBJ_DICTIONARY(&l_philo[0]);
函数字典
使用宏
QS_FUN_DICTONARY()来生成函数字典,它把函数在内存的地址和它的符号名联系起来。信号字典
使用宏
QS_SIG_DICTONARY()来生成信号字典,它把事件信号的数值和状态机对象这两者和信号的符号名联系起来。同时使用信号的数值和状态对象的理由是,仅使用信号值不能有效的把符号化信号区分出来。只有全局发行的信号在系统范围内才是唯一的。其他信号,仅在本地使用,在系统的不同状态机里有完全不同的意义。
应用程序相关的 QS 追踪记录
应用程序相关的 QS 记录允许你从应用层代码生成追踪信息。你可以把应用相关的记录想像成和 printf() 等效的功能,但是它有更少的开销。
1
2
3
4
5
6
QS_BEGIN(MY_QS_RECORD, myObjectPointer) /* trace record begin */
QS_STR("Hello"); /* string data element */
QS_U8(3, n); /* uint8_t data, 3-decimal digits format */
. . . /* QS data */
QS_MEM(buf, sizeof(buf)); /* memory block of a given size */
QS_END() /* trace record end */
由 QS_BEGIN 开始,QS_BEGIN 自带上锁功能,参数为一个 QS 记录类型 MY_QS_RECORD(用于全局过滤器)和一个对象指针 myObjectPointer(用于本地过滤器)
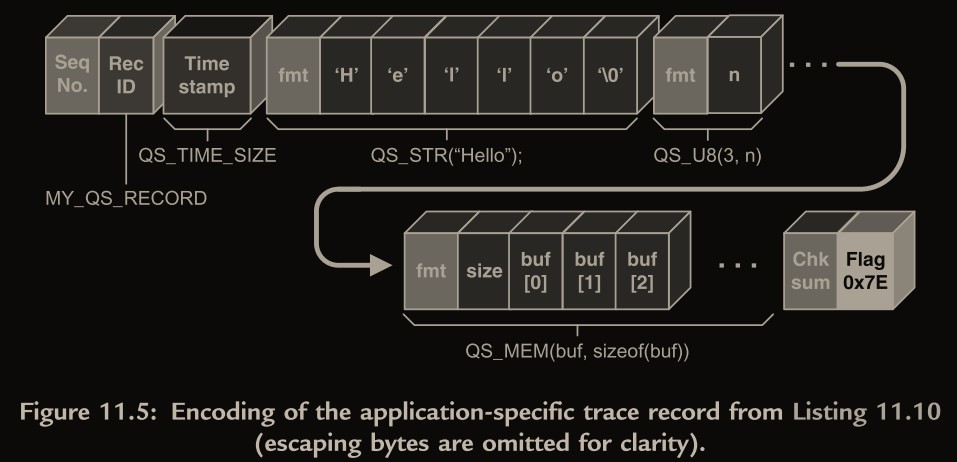
上图是上述示例代码的表示
移植和配置 QS
修改 qs_port.h
QSPY 主机应用程序
使用 C++实现,它的用途仅是提供 QS 数据语法分析,存储,并把数据输出到其他强大的工具比如 MATLAB。
向 MATLAB 输出追踪数据
略
向 QP 应用程序添加 QS 软件追踪
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
/* Local-scope objects -----------------------------------------------------*/
static QEvent const *l_tableQueueSto[N_PHILO];
static QEvent const *l_philoQueueSto[N_PHILO][N_PHILO];
static QSubscrList l_subscrSto[MAX_PUB_SIG];
static union SmallEvent
{
void *min_size;
TableEvt te;
/* other event types to go into this pool */
} l_smlPoolSto[2 * N_PHILO]; /* storage for the small event pool */
/*..........................................................................*/
int main(int argc, char *argv[])
{
uint8_t n;
Philo_ctor(); /* instantiate all Philosopher active objects */
Table_ctor(); /* instantiate the Table active object */
BSP_init(argc, argv); /* initialize the BSP (including QS) */
QF_init(); /* initialize the framework and the underlying RT kernel */
/* setup the QS filters ... */
// 全局过滤器默认全禁止,这里全开一下
QS_FILTER_ON(QS_ALL_RECORDS);
// 关闭一些打印较频繁的记录类型(全局过滤器)
QS_FILTER_OFF(QS_QF_INT_LOCK);
QS_FILTER_OFF(QS_QF_INT_UNLOCK);
QS_FILTER_OFF(QS_QK_SCHEDULE);
/* provide object dictionaries... */
// 创建对象字典
QS_OBJ_DICTIONARY(l_smlPoolSto);
QS_OBJ_DICTIONARY(l_tableQueueSto);
QS_OBJ_DICTIONARY(l_philoQueueSto[0]);
QS_OBJ_DICTIONARY(l_philoQueueSto[1]);
QS_OBJ_DICTIONARY(l_philoQueueSto[2]);
QS_OBJ_DICTIONARY(l_philoQueueSto[3]);
QS_OBJ_DICTIONARY(l_philoQueueSto[4]);
QF_psInit(l_subscrSto, Q_DIM(l_subscrSto)); /* init publish-subscribe */
/* initialize event pools... */
QF_poolInit(l_smlPoolSto, sizeof(l_smlPoolSto), sizeof(l_smlPoolSto[0]));
for (n = 0; n < N_PHILO; ++n)
{ /* start the active objects... */
QActive_start(AO_Philo[n], (uint8_t)(n + 1),
l_philoQueueSto[n], Q_DIM(l_philoQueueSto[n]),
(void *)0, 0, (QEvent *)0);
}
QActive_start(AO_Table, (uint8_t)(N_PHILO + 1),
l_tableQueueSto, Q_DIM(l_tableQueueSto),
(void *)0, 0, (QEvent *)0);
QF_run(); /* run the QF application */
return 0;
}
定义平台相关的 QS 回调函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
#include "qp_port.h"
#include "dpp.h"
#include "bsp.h"
...
/* Local-scope objects -----------------------------------------------------*/
#ifdef Q_SPY
static uint16_t l_uart_base; /* QS data uplink UART base address */
...
#define UART_16550_TXFIFO_DEPTH 16
#endif
...
/*..........................................................................*/
void
BSP_init(int argc, char *argv[])
{
char const *com = "COM1";
uint8_t n;
if (argc > 1)
{
l_delay = atol(argv[1]); /* set the delay counter for busy delay */
}
if (argc > 2)
{
com = argv[2];
(void)com; /* avoid compiler warning if Q_SPY not defined */
}
// QS未启用,QS_INIT()未自定义时,总是返回True
if (!QS_INIT(com))
{ /* initialize QS */
// 断言
Q_ERROR();
}
...
}
/*..........................................................................*/
// 在空闲循环里, QK 可抢占式内核调用 QK_onIdle()回调函数
void QK_onIdle(void)
{
#ifdef Q_SPY
if ((inportb(l_uart_base + 5) & (1 << 5)) != 0)
{ /* Tx FIFO empty? */
uint16_t fifo = UART_16550_TXFIFO_DEPTH; /* 16550 Tx FIFO depth */
uint8_t const *block;
QF_INT_LOCK(dummy);
block = QS_getBlock(&fifo); /* try to get next block to transmit */
QF_INT_UNLOCK(dummy);
while (fifo-- != 0)
{ /* any bytes in the block? */
outportb(l_uart_base + 0, *block++);
}
}
#endif
}
...
/*--------------------------------------------------------------------------*/
#ifdef Q_SPY /* define QS callbacks */
/*..........................................................................*/
// 配置 80x86 系列 PC 的某个标准 UART ( COM1 到 COM4 )
static uint8_t
UART_config(char const *comName, uint32_t baud)
{
switch (comName[3])
{ /* Set the base address of the COMx port */
case '1':
l_uart_base = (uint16_t)0x03F8;
break; /* COM1 */
case '2':
l_uart_base = (uint16_t)0x02F8;
break; /* COM2 */
case '3':
l_uart_base = (uint16_t)0x03E8;
break; /* COM3 */
case '4':
l_uart_base = (uint16_t)0x02E8;
break; /* COM4 */
default:
return (uint8_t)0; /* COM port out of range failure */
}
baud = (uint16_t)(115200UL / baud); /* divisor for baud rate */
outportb(l_uart_base + 3, (1 << 7)); /* Set divisor access bit (DLAB) */
outportb(l_uart_base + 0, (uint8_t)baud); /* Load divisor */
outportb(l_uart_base + 1, (uint8_t)(baud >> 8));
outportb(l_uart_base + 3, (1 << 1) | (1 << 0)); /* LCR:8-bits,no p,1stop */
outportb(l_uart_base + 4, (1 << 3) | (1 << 1) | (1 << 0)); /*DTR,RTS,Out2*/
outportb(l_uart_base + 1, 0); /* Put UART into the polling FIFO mode */
outportb(l_uart_base + 2, (1 << 2) | (1 << 0)); /* FCR: enable, TX clear */
return (uint8_t)1; /* success */
}
/*..........................................................................*/
// 初始化 QS 构件
uint8_t QS_onStartup(void const *arg)
{
static uint8_t qsBuf[2 * 1024]; /* buffer for Quantum Spy */
// 初始化 QS 追踪缓存
QS_initBuf(qsBuf, sizeof(qsBuf));
return UART_config((char const *)arg, 115200UL);
}
/*..........................................................................*/
// 执行 QS 的清理工作
void QS_onCleanup(void)
{
}
/*..........................................................................*/
// 回调函数 QS_onFlush() 把整个追踪缓存发送给主机。在每个字典追踪记录后调用这个函数, 用来避免在系统初始化时追踪缓存的溢出。
void QS_onFlush(void)
{
uint16_t fifo = UART_16550_TXFIFO_DEPTH; /* 16550 Tx FIFO depth */
uint8_t const *block;
QF_INT_LOCK(dummy);
while ((block = QS_getBlock(&fifo)) != (uint8_t *)0)
{
QF_INT_UNLOCK(dummy);
/* busy-wait until TX FIFO empty */
// 忙等待意味着阻塞,所有这个函数仅能在初始化时调用
while ((inportb(l_uart_base + 5) & (1 << 5)) == 0)
{
}
while (fifo-- != 0)
{ /* any bytes in the block? */
outportb(l_uart_base + 0, *block++);
}
fifo = UART_16550_TXFIFO_DEPTH; /* re-load 16550 Tx FIFO depth */
QF_INT_LOCK(dummy);
}
QF_INT_UNLOCK(dummy);
}
/*..........................................................................*/
// 获取时间戳
QSTimeCtr QS_onGetTime(void)
{ /* see Listing 11.18 */
...
}
#endif /* Q_SPY */
/*--------------------------------------------------------------------------*/
使用回调函数 QS_onGetTime() 产生 QS 时间戳
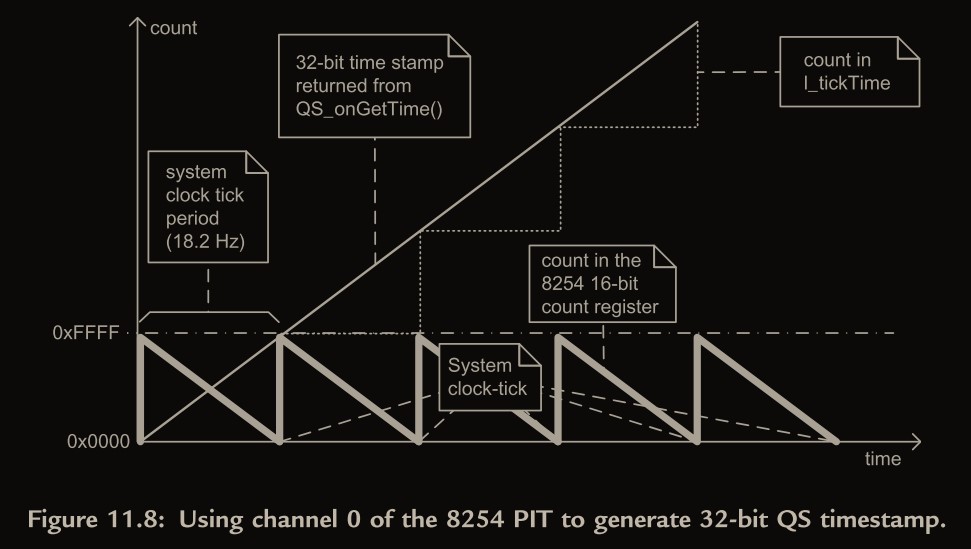
8254 芯片的计时器 0 是一个 16 位向下计数器,它被设置成当它从 0xFFFF 到 0 下溢,每次到 0 时产生标准的 18.2Hz 时钟节拍中断,下一次计数时计数器回绕成 0xFFFF。 计数速率是 1.193182MHz ,大约每个计数是 0.838 微秒。
每次系统节拍中断就记一次 0x10000,精度就是 0x10000,还要获取更精细的值就要读上面说的计时器了,它的值会从 0xFFFF 到 0 。中断计数成上 0x10000 加上计数器的值就是完整的值了。
有个问题就是如果系统节拍中断丢失,就会少加 0x10000,需要通过手段规避
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
/* Local-scope objects -----------------------------------------------------*/
#ifdef Q_SPY
static QSTimeCtr l_tickTime; /* keeps timestamp at tick */
static uint32_t l_lastTime; /* last timestamp */
#endif
...
// 系统时钟节拍中断
void interrupt ISR_tmr(void)
{
uint8_t pin;
#ifdef Q_SPY
// 在中断处理程序里加0x10000
l_tickTime += 0x10000; /* add 16-bit rollover */
#endif
QK_ISR_ENTRY(pin, TMR_ISR_PRIO); /* inform QK about entering the ISR */
QF_tick(); /* call QF_tick() outside of critical section */
QK_ISR_EXIT(pin); /* inform QK about exiting the ISR */
}
/*..........................................................................*/
#ifdef Q_SPY /* define QS callbacks */
...
// 总是在代码的某个临界区调用 QS_onGetTime() 函数。
QSTimeCtr QS_onGetTime(void)
{ /* invoked with interrupts locked */
uint32_t now;
uint16_t count16; /* 16-bit count from the 8254 */
if (l_tickTime != 0) // 系统节拍器已使能
{ /* time tick has started? */
// 8254的计数器 0 被锁住。这样才能安全读取
outportb(0x43, 0); /* latch the 8254's counter-0 count */
count16 = (uint16_t)inportb(0x40); /* read the low byte of counter-0 */
count16 += ((uint16_t)inportb(0x40) << 8); /* add on the hi byte */
now = l_tickTime + (0x10000 - count16);
// 说明丢失了一次系统节拍中断(这个检查假设 QS_onGetTime() 在每个回绕周期被调用一次。)
// 因为假设了每个中断周期内至少调用一次,所以now正常肯定是大于等于l_lastTime的
// 而且要假设周期内调用的时间是一样的
if (l_lastTime > now)
{ /* are we going "back" in time? */
// 手动加1
now += 0x10000; /* assume that there was one rollover */
}
l_lastTime = now;
}
else // 系统节拍器还未使能
{
now = 0;
}
return (QSTimeCtr)now;
}
#endif /* Q_SPY */
从主动对象产生 QS 字典
table.c:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
// 这个是哲学家就餐问题,有叉子、饥饿等名词,Table是活动对象类
static Table l_table; /* the single instance of the Table active object */
...
// 初始伪状态比较适合做生成字典操作
void Table_initial(Table *me, QEvent const *e)
{
(void)e; /* suppress the compiler warning about unused parameter */
// 这个宏可以获取参数的名字,所以要用l_table而不是me,即使它们的值相同
QS_OBJ_DICTIONARY(&l_table);
// 函数字典
QS_FUN_DICTIONARY(&QHsm_top);
QS_FUN_DICTIONARY(&Table_initial);
QS_FUN_DICTIONARY(&Table_serving);
// 全局发行的信号的信号字典记录必须和系统里所有的状态机相联系。
// 所以要给这种信号添加额外信息,这里是第二个参数
// 比如在另一个状态机里是1而不是0
QS_SIG_DICTIONARY(DONE_SIG, 0); /* global signals */
QS_SIG_DICTIONARY(EAT_SIG, 0);
QS_SIG_DICTIONARY(TERMINATE_SIG, 0);
// 可以直接用me的值(一个地址)作为额外信息,保证不会重复
QS_SIG_DICTIONARY(HUNGRY_SIG, me); /* signal just for Table */
/* signal HUNGRY_SIG is posted directly */
QActive_subscribe((QActive *)me, DONE_SIG);
QActive_subscribe((QActive *)me, TERMINATE_SIG);
Q_TRAN(&Table_serving);
}
按照本地过滤器中的对象说明,这个 l_table 应该是活动对象
添加应用程序相关的追踪记录
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
#ifdef Q_SPY
...
enum AppRecords { /* application-specific trace records */
// 自定义的记录类型需要从QS_USER开始
PHILO_STAT = QS_USER
};
#endif
...
/*..........................................................................*/
void
BSP_displyPhilStat(uint8_t n, char const *stat)
{
Video_printStrAt(17, 12 + n, VIDEO_FGND_YELLOW, stat);
// 第一个是记录类型,用于全局过滤器,第二个是应用对象,用于本地过滤器,
// 这里是活动对象类型,表示只记录这个活动对象相关记录
// QS_BEGIN和QS_END划定临界区
QS_BEGIN(PHILO_STAT, AO_Philo[n]) /* application-specific record begin */
QS_U8(1, n); /* Philosopher number */
QS_STR(stat); /* Philosopher status */
QS_END()
}
// 笔者注:格式是 时间 记录类型: n stat
0000525113 User000: 4 eating
. . .
0000591471 User000: 3 hungry
. . .
0000591596 User000: 2 hungry
. . .
0000591730 User000: 0 hungry
. . .
0000852276 User000: 4 thinking
. . .
0000852387 User000: 3 eating
. . .
0000983937 User000: 1 thinking
. . .
0000984047 User000: 0 eating
. . .
0001246064 User000: 3 thinking
问题
- 单过程处理时间,是否在 DMA 时主动让出控制权(时间较短,让出利用率也低,还有一致性问题)
- 内存分配,由于没有栈空间,需要堆类型的空间(QP 自带的内存池)
- state local memory,每个 AO 自己的内部变量,即使是临时变量也会占用固定空间,为了退出后下次进入状态时使用,如果是临时变量会浪费空间